Address (adr), Group address, User data type (type) – Metalfab SEW Eurodrive MOVIMOT MM..C User Manual
Page 123: Timeout monitoring
Operating Instructions – MOVIMOT® MM03C - MM3XC
123
9
Function with RS-485 master
Startup with Communications Interface / Fieldbus
Start pause (idle)
and start charac-
ter (start delim-
iter)
MOVIMOT
®
detects the start of a request message by means of a start pause lasting at
least 3.44 ms, followed by the character 02
hex
(start delimiter 1). In the event that the
transmission of a valid request message is broken off by the master, a new request mes-
sage may not be sent until at least twice the start pause (approx. 6.88 ms) has elapsed.
Address (ADR)
MOVIMOT
®
supports the address range from 0 to 15 and access via the point-to-point
address (254) or via the broadcast address (255). It is only possible to read the current
process input data (status word, current actual value) via address 0. The output data
sent by the master do not come into effect because PO data processing is not active
when the address setting is 0.
Group address
Furthermore, ADR = 101...115 makes it possible to group together several MOVIMOT
®
units. When this is done, all MOVIMOT
®
units in one group are set to the same RS-485
address (e.g. group 1: ADR = 1, group 2: ADR = 2).
The master can now specify new group setpoints for these groups using ADR = 101 (set-
points to inverters of group 1) and ADR = 102 (setpoints to group 2). The inverters do
not send any response when this addressing variant is used. The master must observe
a rest time of min. 25 ms between two broadcast or group messages.
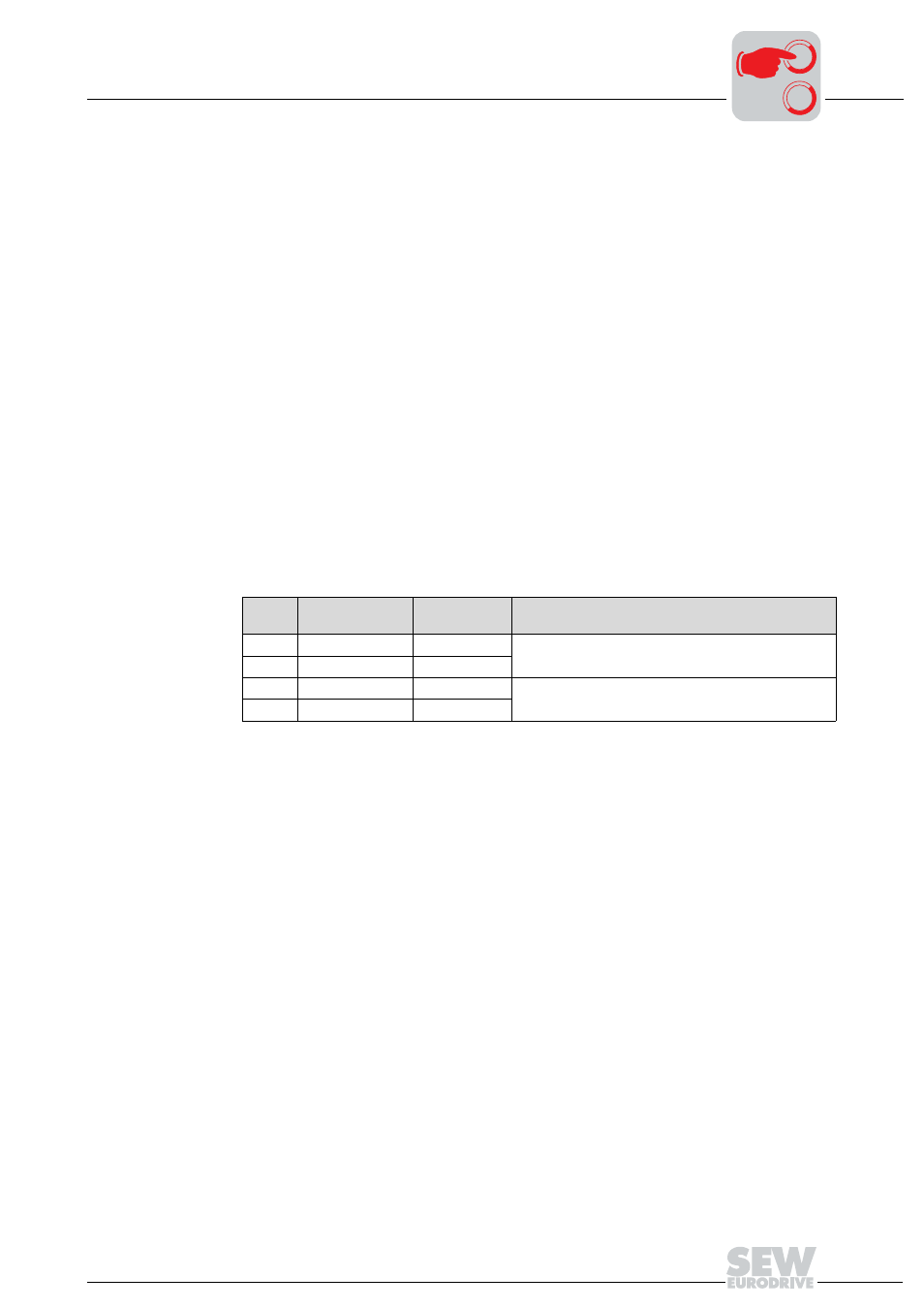
User data type
(TYPE)
MOVIMOT
®
always supports four different PDU types (Protocol Data Unit). These are
largely determined by the process data length and type of transmission.
Timeout monitor-
ing
In "cyclical" transmission, MOVIMOT
®
expects the next bus activity (request message
of the aforementioned types) within one second at most. If this bus activity is not detect-
ed, the drive automatically decelerates with the most recently valid ramp (timeout mon-
itoring). The "ready" signal relay drops out. There is no timeout monitoring if the "acycli-
cal" transmission variant is selected.
Type
Transmission
type
Process data
length
User data
03
hex
Cyclical
2 words
Control word / speed [%] status word 1 / output current
83
hex
Acyclical
2 words
05
hex
Cyclical
3 words
Control word / speed [%] / ramp status word 1 / output
current / status word 2
85
hex
Acyclical
3 words
0
0
I