Rockwell Automation 294E ArmorStart LT EtherNet/IP Version - User Manual User Manual
Page 150
150
Rockwell Automation Publication 290E-UM001B-EN-P - June 2012
Chapter 4
Bulletin 290E/291E/294E Programmable Parameters
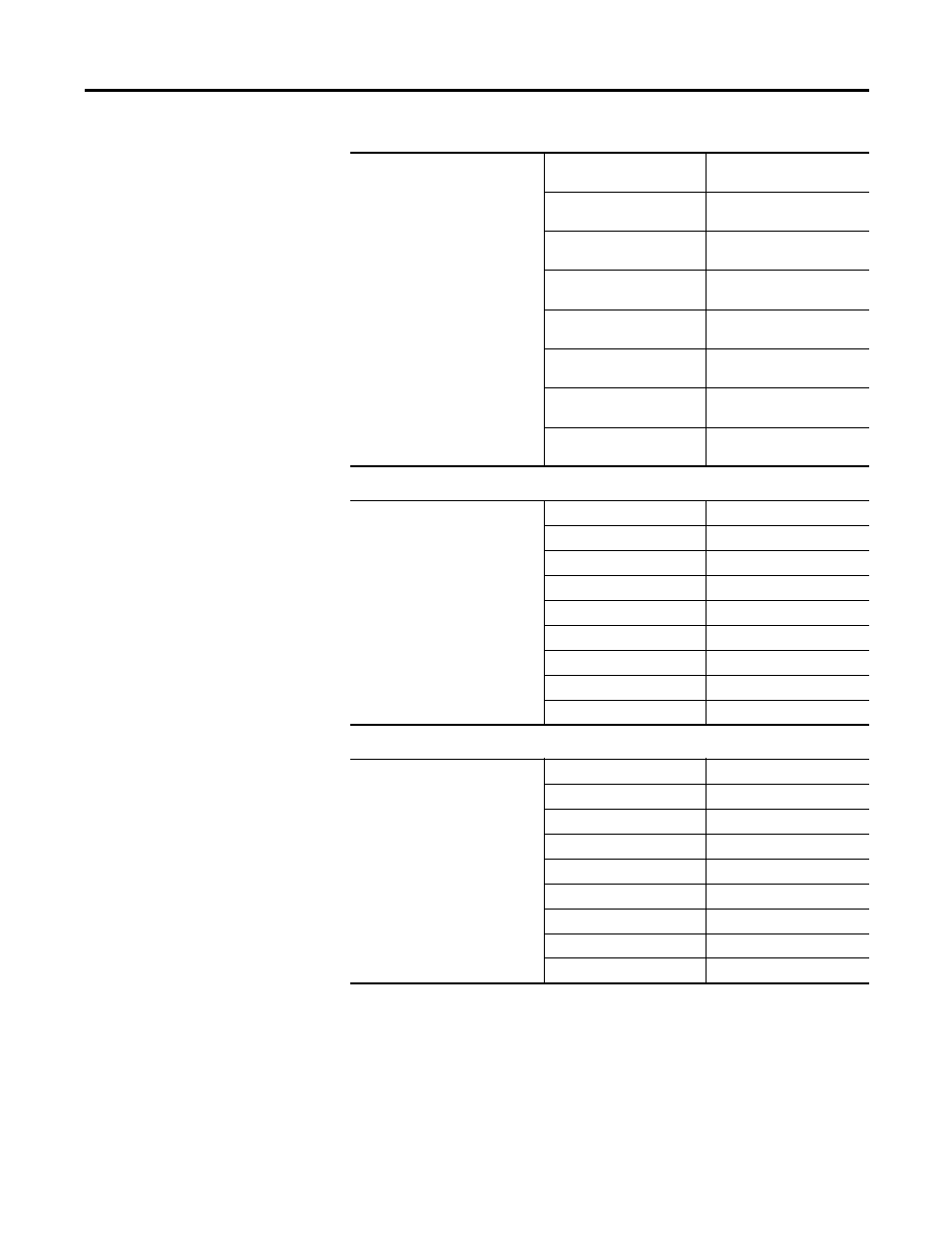
Compensation
Enables/disables correction options
that may improve problems with
motor instability,
0 = Disabled
1 = Electrical (Default)
Some drive/motor combinations have
inherent instabilities which are exhibited
as non-sinusoidal motor currents. This
setting attempts to correct this condition
2 = Mechanical
Some motor/load combinations have
mechanical resonances which can be
excited by the drive current regulator. This
setting slows down the current regulator
response and attempts to correct this
condition.
3 = Both
Parameter Number
79
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
—
Minimum Value
0
Maximum Value
3
Default Value
1
SlipHertzAtFLA
Compensates for the inherent slip in an
induction motor. This frequency is added
to the commanded output frequency
based on motor current.
Parameter Number
80
Related Parameters
30
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
x.x Hz
Minimum Value
0.0 Hz
Maximum Value
10.0 Hz
Default Value
2.0 Hz
BusRegulateMode
Controls the operation of the drive voltage
regulation, which is normally operational
at deceleration or when the bus voltage
rises.
0 = Disable
1 = Enabled
Parameter Number
81
Related Parameters
—
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0