C15411 | speed comparison tolerance, C15420 | sin/cos encoder ppr, C15430 | number of resolver pole pairs – Lenze E94AYAE SM301 User Manual
Page 94: C15500 | position encoder system, C15420, C15430, C15500, C15411, 5parameter reference
5
Parameter reference
5.1
Parameter list | C15411
94
Lenze · SM301 safety module · Parameter setting & configuration · DMS 2.3 EN · 11/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
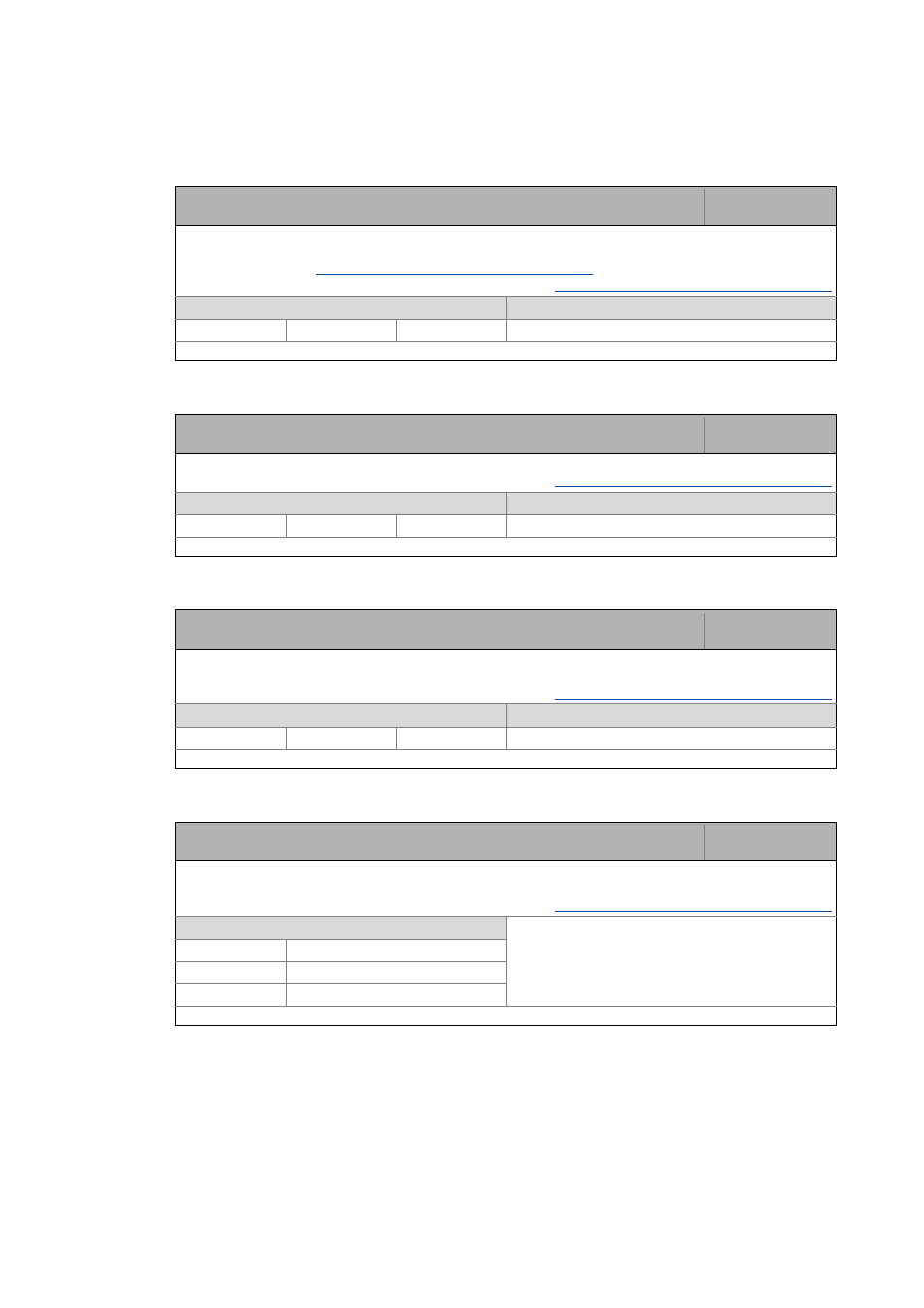
C15411
C15420
C15430
C15500
Parameter | Name:
C15411 | Speed comparison tolerance
Data type: UNSIGNED_16
Index: 9164
d
= 23CC
h
From V1.3
Parameterisable tolerance of speed comparison in the safety module.
• See note in chapter "
Safe speed measurement and position detection
Safe speed measurement and position detection
Setting range
(min. value | unit | max. value)
Lenze setting
0
rpm
16000 20 rpm
Read access Write access CINH PLC-STOP No transfer Scaling factor: 1
Parameter | Name:
C15420 | Sin/cos encoder PPR
Data type: UNSIGNED_16
Index: 9155
d
= 23C3
h
PPR of the sin/cos encoder used.
Safe speed measurement and position detection
Setting range
(min. value | unit | max. value)
Lenze setting
1
16384 1
Read access Write access CINH PLC-STOP No transfer Scaling factor: 1
Parameter | Name:
C15430 | Number of resolver pole pairs
Data type: UNSIGNED_8
Index: 9145
d
= 23B9
h
From V1.3
Number of pole pairs of the resolver used as motor encoder system.
Safe speed measurement and position detection
Setting range
(min. value | unit | max. value)
Lenze setting
1
10 1
Read access Write access CINH PLC-STOP No transfer Scaling factor: 1
Parameter | Name:
C15500 | Position encoder system
Data type: UNSIGNED_8
Index: 9075
d
= 2373
h
From V1.3
Setting of the connected position encoder system.
Safe speed measurement and position detection
Selection list
(Lenze setting printed in bold)
0 No position encoder
1 Analog encoder (sin/cos/TTL)
2 Digital encoder (SSI/bus)
Read access Write access CINH PLC-STOP No transfer Scaling factor: 1