Important, Output phase form, Pulse divider setting – Yaskawa FSP Amplifier User Manual
Page 88: Sg: connect to 0 v on the host controller
FSP Amplifier User’s Manual
Chapter 5: Parameter Settings and Functions
5-21
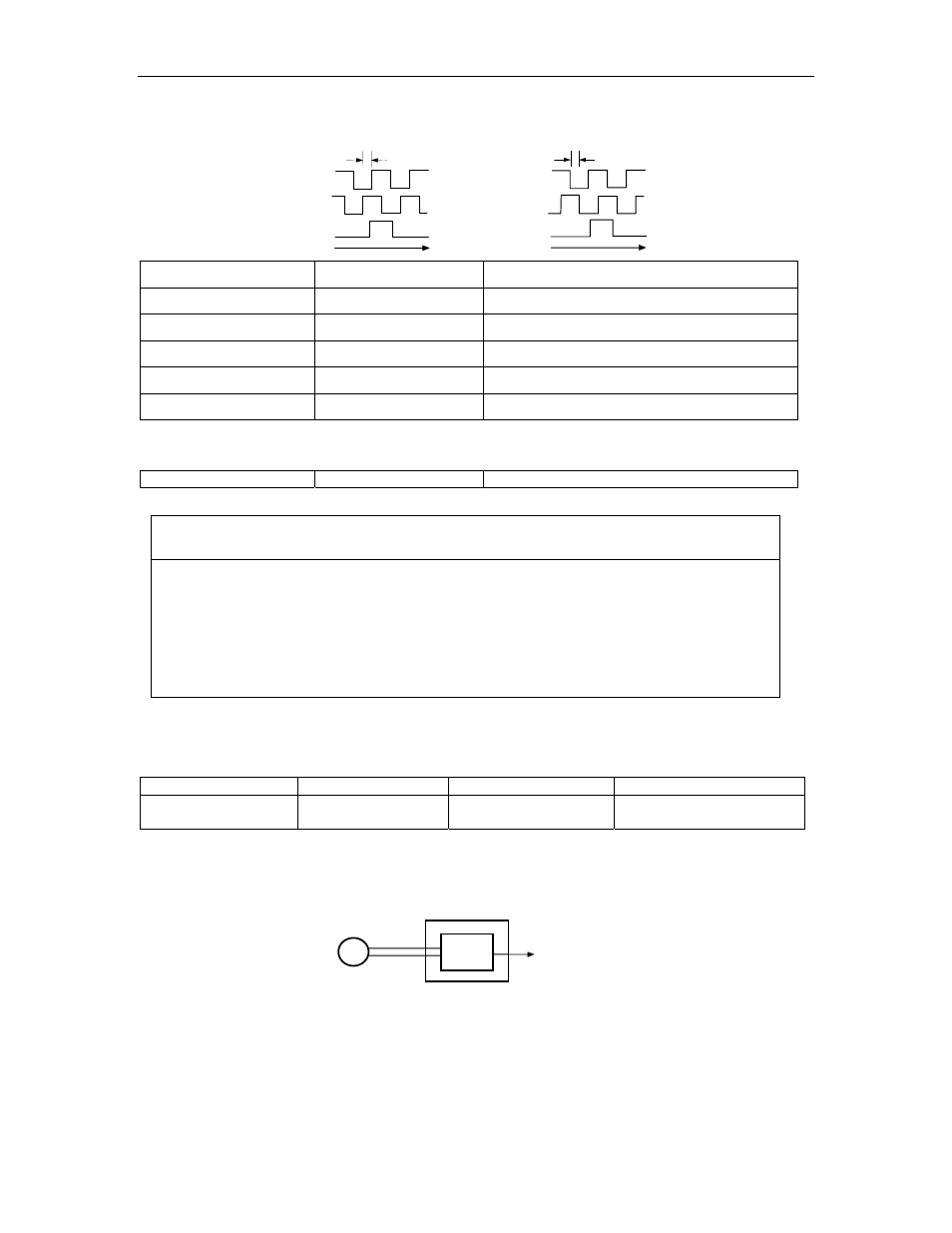
Output Phase Form
t
t
Reverse
rotation
Forward
rotation
90°
90°
Ö Input SEN CN1-4
SEN Signal Input
Speed, Torque, Position Control, and Programming
Ö
Input /SEN CN1-2
Signal Ground
Speed, Torque, Position Control, and Programming
Output Ö PSO CN1-48
Encoder Output Phase S
Speed, Torque, Position Control, and Programming
Output Ö /PSO CN1-49
Encoder Output Phase /S
Speed, Torque, Position Control, and Programming
Ö Input BAT (+) CN1-21
Battery (+)
Speed, Torque, Position Control, and Programming
Ö Input /BAT (-) CN1-22
Battery (-)
Speed, Torque, Position Control, and Programming
Use SEN to BAT (-) signals for absolute encoders. See 5.7 Absolute Encoders for more
details.
Output Ö SG CN1-1
Signal ground
Speed, Torque, Position Control, and Programming
SG: Connect to 0 V on the host controller.
IMPORTANT
• When using the servo amplifier phase C pulse signal to return to the
machine origin, always turn the servomotor at least twice before starting
the original return operation.
If the configuration of the mechanical system prevents turning the servomotor before the
origin return operation, then perform the origin return operation at a servomotor speed of
600 rpm or below. The phase C pulse signal may not be correctly applied if the servomotor
turns faster than 600 rpm.
Pulse Divider Setting
Set the pulse dividing ratio in the following parameter:
Parameter
Signal
Setting (PPR)
Control Mode
Pn201 PG
Divider
Range: 0 to 65535
Default Setting: 2048
Position Control and
Programming
Serial encoder
Set the number of pulses for PG output signals (PAO, /PAO, PBO, /PBO).
FSP Amplifier
Frequency
division
Encoder
PG
Phase A
Phase B
Serial
data
Output
Output terminals: PAO (CN1
-33)
/PAO (CN1
-34)
PBO (CN1
-35)
/PBO (CN1
-36)
Pulses from the servomotor encoder (PG) are divided by the preset number
before being output.
The number of output pulses per revolution is set by this parameter. Set
the value using the reference units of the equipment or the controller used.
The setting range varies with the encoder used.