Load inertia setting, Pitch m, Estimation of equivalent load ( j – Yaskawa FSP Amplifier User Manual
Page 174: 32 4 d l j, 2n j j, Pitch
FSP Amplifier User’s Manual
Chapter 6: Servo Adjustment
6-7
6.2.6. Load Inertia Setting
In order to use values of Loop Gains that are closely related to the
characteristics of your system, loop gains are normalized in Hertz. This
normalization of parameters is done according to the assumed inertia of the
system.
You should do a rough estimation of the inertia of the load for your system
and input its value in the Load Inertia Ratio parameter (Pn103).
Set Pn103 to the following value.
Pn103 =
)
(J
Inertia
Rotor
Servomotor
)
(J
Inertia
Motor Load
M
L
x 100%
Parameter Signal
Setting
(%)
Application
Pn103 Inertia
Ratio
Range: 0 to 10000
Default Setting: 0
Speed, Torque,
Position Control, and
Programming
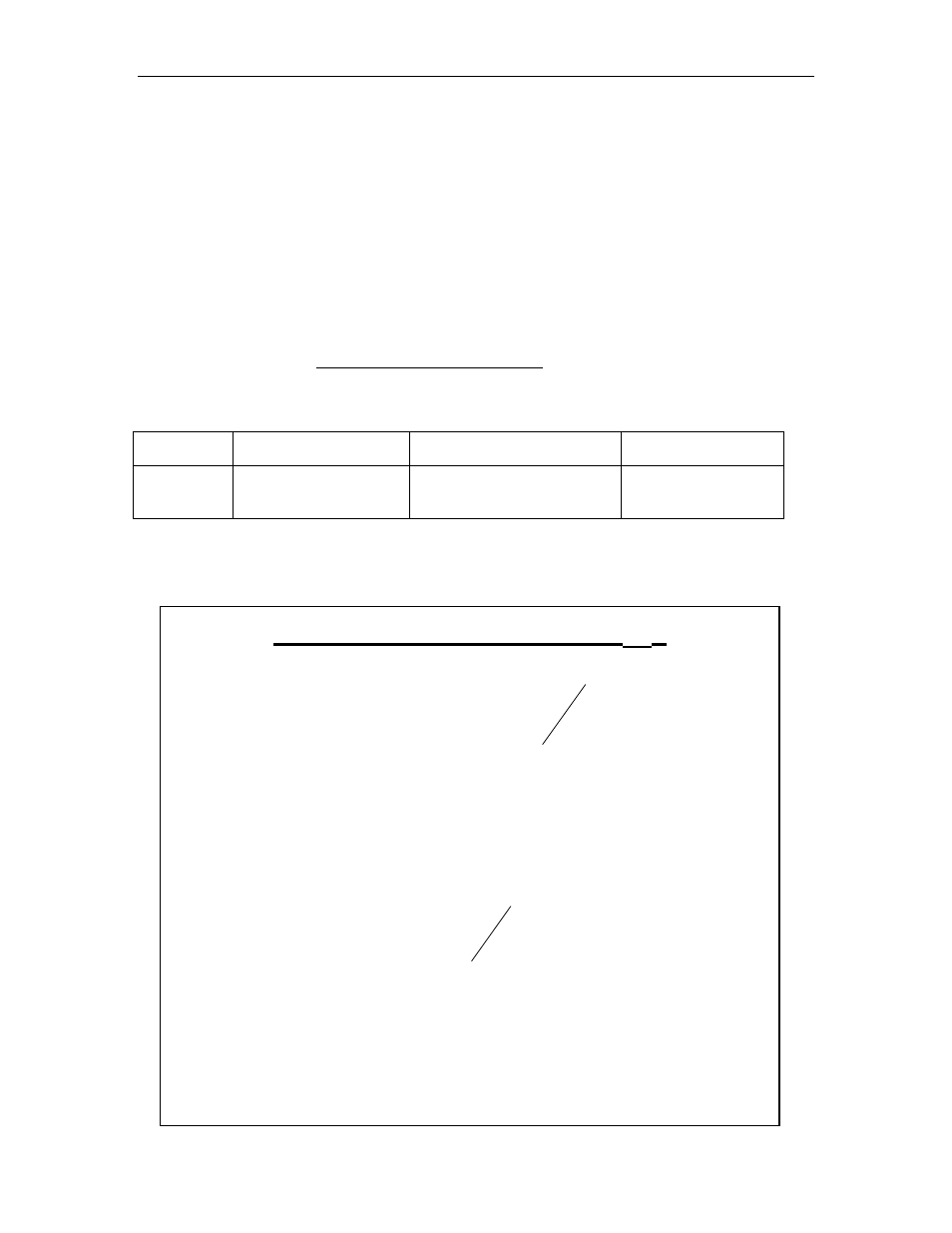
The following shows how to calculate the Load Inertial ratio for different
mechanical systems:
Estimation of Equivalent Load ( J
load
)
Case 1: Load is a cylinder directly mounted or coupled to the motor axis:
32
4
d
l
J
load
×
×
×
=
ρ
π
ρ is the density of the load material[kg/m
3
].
L is the length
D is the diameter of the load [m].
Case 2: Load is driven through a gear with ratio N:
Equivalent load on motor is:
2
N
J
J
load
=
Case 3: Load is a mass driven by a ball screw having pitch:
2
Pitch
M
load
J
×
=
+ J
screw
+ J
coupling
J
load
,
Æ Kg.m
2
, M
Æ Kg,
Pitch
Æ meter/radian
Other Cases: Make your own rough load inertia evaluations.