Rockwell Automation 2098-IPD-xxx Ultra5000 Intelligent Positioning Drives Installation Manual User Manual
Page 90
Publication 2098-IN001E-EN-P — April 2002
5-4
Maintaining Your Ultra5000
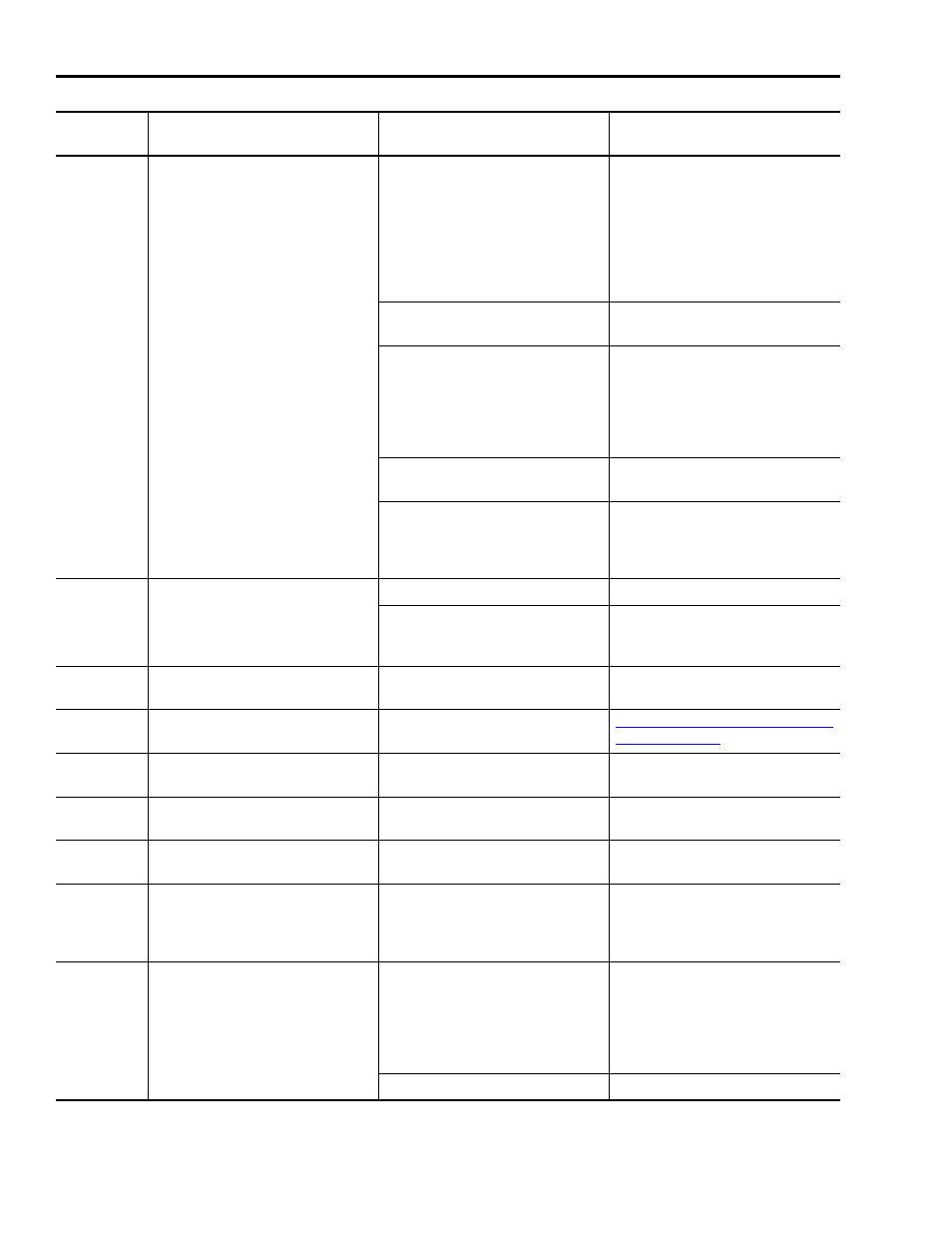
10
Bus Overvoltage
Excessive regeneration of power.
When the motor is driven by an
external mechanical power source, it
may regenerate too much peak energy
through the Ultra5000’s power supply.
The system faults to save itself from
an overload.
• Change the deceleration or motion
profile.
• Use a larger system (motor and
Ultra5000).
• Use a resistive shunt.
Excessive AC input voltage.
Verify input is below within
specifications.
Output short circuit.
Remove all power and motor
connections, and preform a continuity
check from the DC bus to the U, V, and
W motor outputs. If a continuity exists,
check for wire fibers between
terminals, or send drive in for repair.
Motor cabling wires shorted together.
Disconnect motor power cables from
the drive. If faults stop, replace cable.
Internal motor winding short circuit.
Disconnect motor power cables from
the motor. If the motor is difficult to
turn by hand, it may need to be
replaced.
11
Illegal Hall State
Incorrect phasing.
Check the Hall phasing.
Bad connections.
• Verify the Hall wiring.
• Verify 5V power supply to the
encoder.
12 - 16
Reserved
Call your local Allen-Bradley
representative.
14
DeviceNet Comm Fault
Drive has lost communications with
DeviceNet interface.
Refer to Troubleshooting for DeviceNet
Drives on page 5-6
.
15 - 16
Reserved
Call your local Allen-Bradley
representative.
17
User-Specified Current Fault
User-Specified average current level
has been exceeded.
Increase to a less restrictive setting.
18
Overspeed Fault
Motor speed has exceeded 125% of
maximum rated speed.
• Check cables for noise.
• Check tuning.
19
Excess Position Error
Position error limit was exceeded.
• Increase the feed forward gain.
• Increase following error limit or
time.
• Check position loop tuning.
20
Motor Encoder State Error
The motor encoder encountered an
illegal transition.
• Replace the motor/encoder.
• Use shielded cables with twisted
pair wires.
• Route the feedback away from
potential noise sources.
• Check the system grounds.
Bad encoder.
Replace motor/encoder.
Error
Code
Problem or Symptom
Possible Cause(s)
Action/Solution