Fu n c tio n – Futaba 4PX 2.4GHz FASST T-FHSS S-FHSS User Manual
Page 128
128
Fu
n
c
tio
n
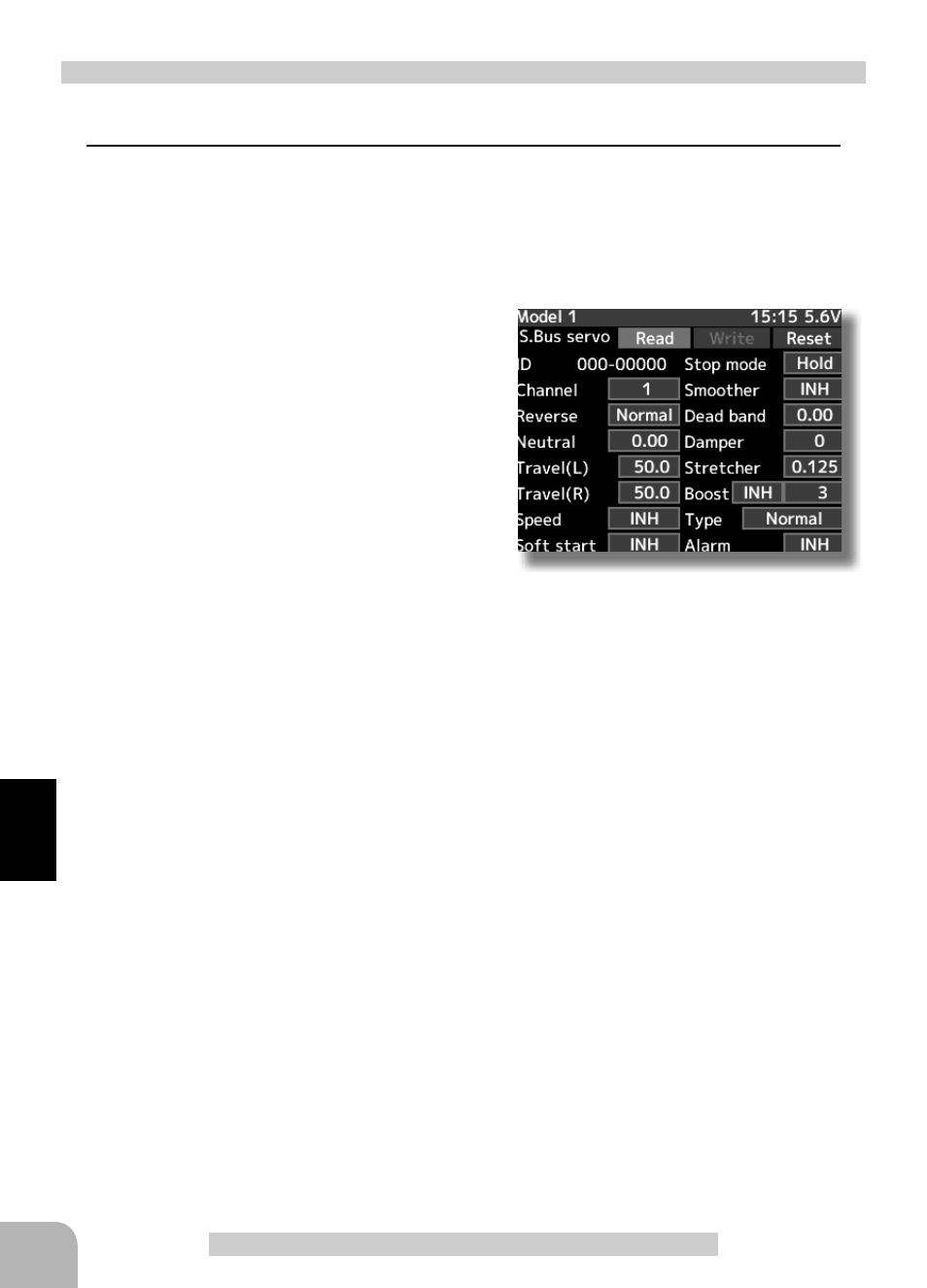
S.Bus Servo
S.BUS function setup
(Preparation)
6%866%86VHUYRLVUHDGUHIHUULQJWRWKHH[SODQDWLRQRISDJH
1
Select the setting item by (JOG) button up, down, left, or right operation.
Set the value by (+) and (-) button.
ID
Displays the ID of the servo whose parameters are to be read. It cannot be changed.
Channel
This is the S.BUS system channel assigned to the servo. When
connected to the receiver S-BUS2 connector as an S.BUS sys-
tem, the channel used by the transmitter is assigned. When the
normal receiver channel is used, channel setting is unneces-
sary.
Reverse
The direction in which the servo rotates can be changed.
Neutral
The neutral position can be changed. When the eutral offset is
large value, the servo’s range of travel is restricted on one side.
Travel(L)
The maximum left travels centered about the neutral position
can be set independently.
Travel(R)
The maximum right travels centered about the neutral position can be set independently.
Speed
Speeds can be matched by specifying the operating speed. The speed of multiple servos can be matched without be-
ing affected by motor fluctuations. This is effective for load torques below the maximum torque.
However, note that the maximum speed will not be exceed what the servo is capable of even if the servos operating
voltage is increased.
Soft Start
Restricts operation in the specified direction the instant the power is turned on. By using this setting, the first initial
movement when the power is turned on slowly moves the servo to the specified position.
Stop Mode
The state of the servo when the servo input signal is lost can be specified. The "Hold" mode setting holds the servo in
its last commanded position even if using AM or FM system.
Smoother
This function makes servo operation smooth. Set it according to your taste. Normally set it to "ACT". Set it to "INH"
when want especially quick operation. When the smoother function was set to "ACT" and the servo was operated the
distance up to the target position is hanged in steps so movement is smooth.
Dead band
The dead band angle at stopping can be specified.
[Relationship between dead band set value and servo operation]
Small - Dead band angle is small and the servo is immediately operated by a small signal change.
Large - Dead band angle is large and the servo does not operate at small signal changes.
(Note)
If the dead band angle is too small, the servo will operate continuously and the current consumption will in-
crease and the life of the servo will be shortened.