Motor feedback connector pinouts – Rockwell Automation 2093-xxxx Kinetix 2000 Multi-axis Servo Drive User Manual User Manual
Page 48
Publication 2093-UM001A-EN-P — March 2007
48
Kinetix 2000 Connector Data
Motor Feedback Connector Pinouts
The table shows the connections made to the drive, or connector kit, for
supported feedback types.
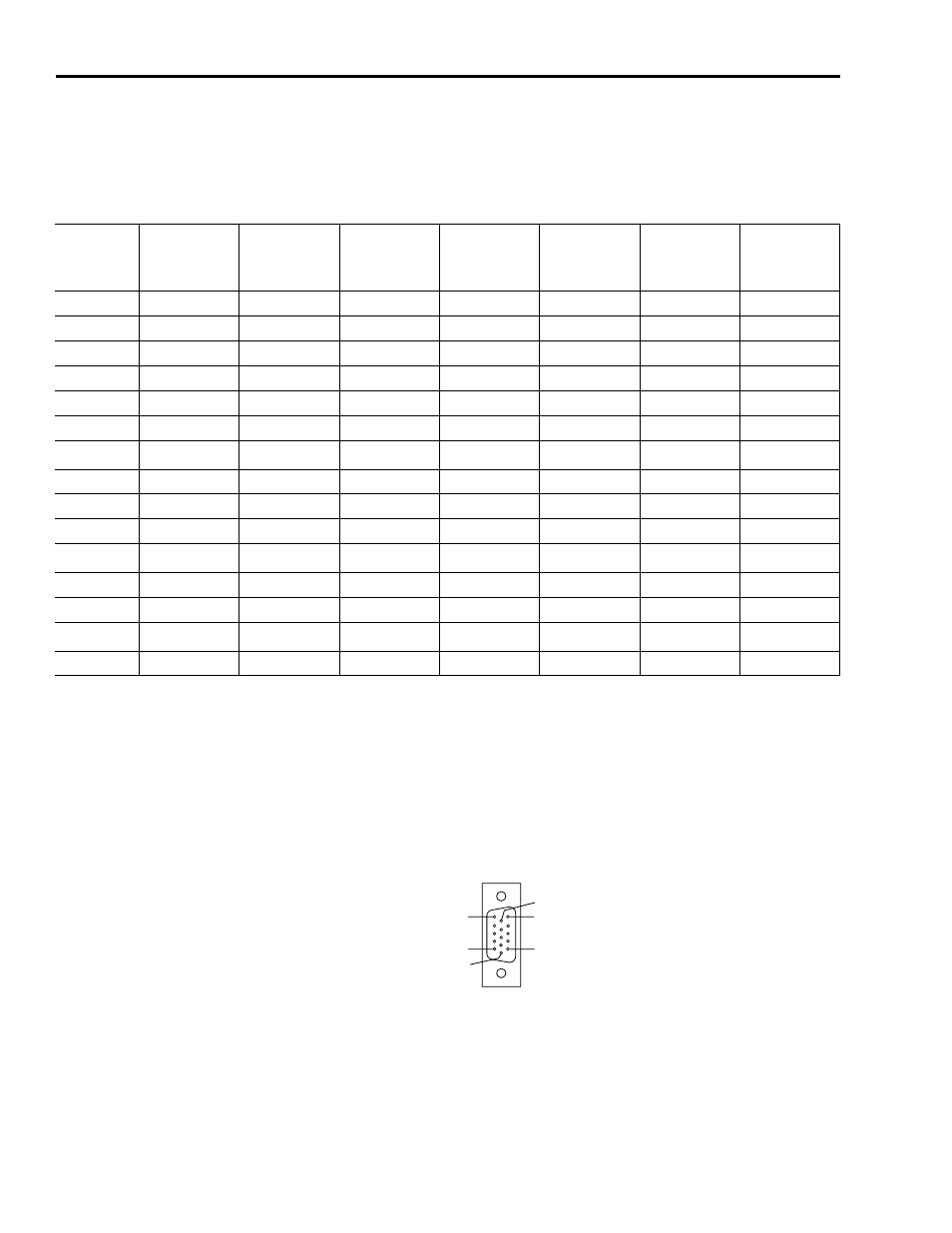
Pin Orientation for 15-pin Motor Feedback (MF) Connector
MF Pin
Stegmann
Hiperface
(SKS, SKM,
SRS, SRM)
Tamagawa
17-bit Serial
(1)
Sine/Cosine
Incremental
with Hall
Sine/Cosine
Incremental
AQB
Incremental
with Hall
AQB
Incremental
Renishaw
(Raptor)
1 AM+ — AM+ AM+ AM+ AM+ AM+
2 AM- — AM- AM- AM- AM- AM-
3 BM+ — BM+ BM+ BM+ BM+ BM+
4 BM- — BM- BM- BM- BM- BM-
5 DATA+
DATA+
IM+ IM+ IM+ IM+ IM+
6 ECOM ECOM ECOM ECOM ECOM ECOM ECOM
7
(2)
— — — — — — —
8
— — S3 — S3 — S3
9
— — — — — — E_OT+
10
DATA-
DATA-
IM- IM- IM- IM- IM-
11
(3)
TS TS TS TS TS TS TS
12
— — S1 — S1 — S1
13
— — S2 — S2 — S2
14
(4)
EPWR_5V EPWR_5V EPWR_5V EPWR_5V EPWR_5V EPWR_5V EPWR_5V
15
— — — — — — E_OT-
(1)
3.6V battery connections are located in the 2090-K2CK-D15M connector kit. The battery (2090-DA-BAT2) is required for this feedback type.
(2)
Pin 7 is EPWR_9V connection that can be used for third party motor applications, Hiperface for example. 9V encoder power supply requirement is 9.1V dc, ±8.8% @ 350
mA total for both channels.
(3)
Not applicable unless motor has integrated thermal protection.
(4)
Pin 14 is EPWR_5V connection for motor applications. 5V encoder power supply requirement is 5.18V dc, ±5% @ 350 mA total for both channels.
Pin 11
Pin 6
Pin 15
Pin 1
Pin 10
Pin 5
15-pin IAM/AM
Motor Feedback Connector