Rockwell Automation 2093-xxxx Kinetix 2000 Multi-axis Servo Drive User Manual User Manual
Page 45
Publication 2093-UM001A-EN-P — March 2007
Kinetix 2000 Connector Data
45
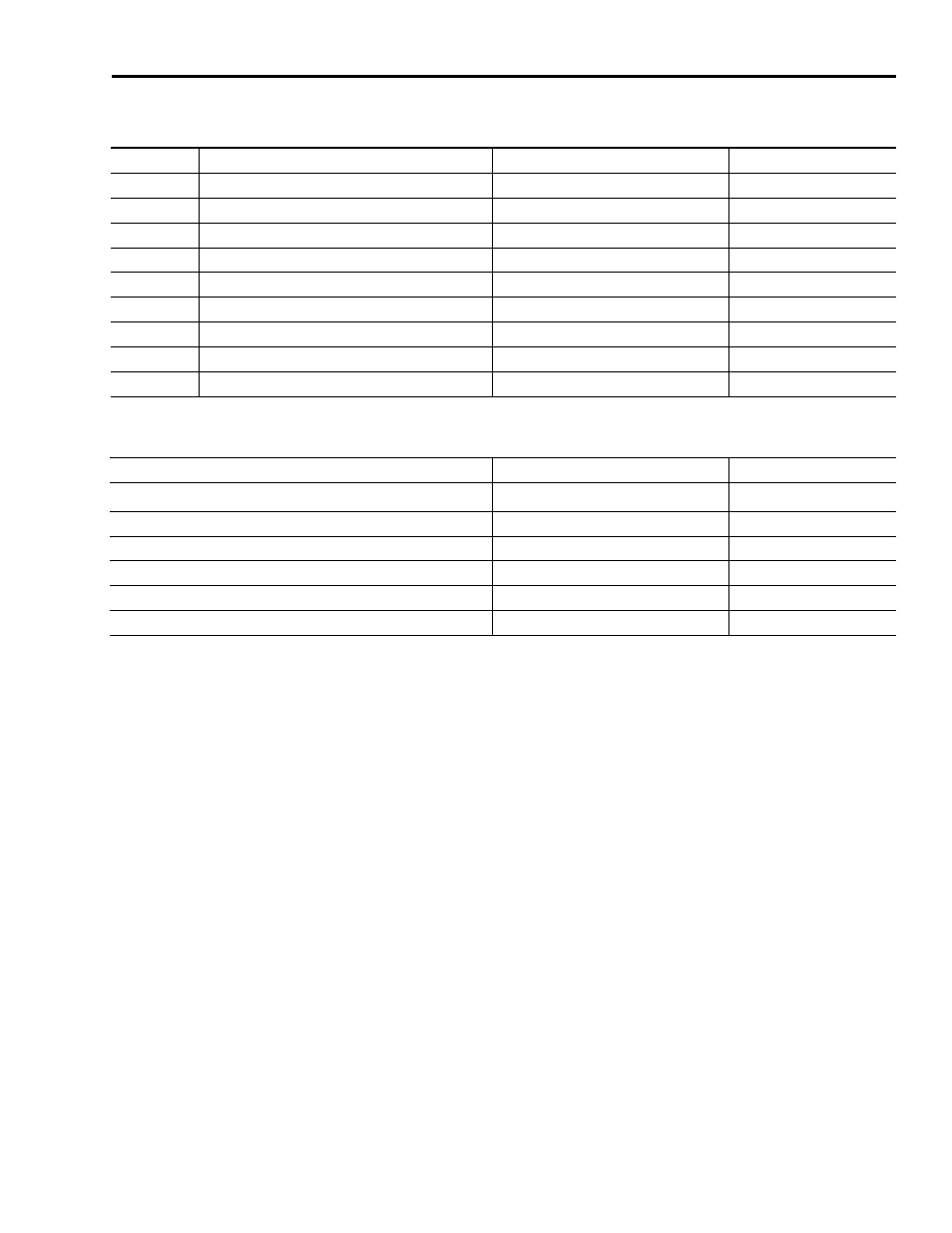
Integrated Axis Module/Axis Module Connectors
Integrated Axis Module/Axis Module Switches and Indicators
Designator
Description
Connector
Present on IAM or AM
BC Motor
brake
4-position
plug/header
IAM/AM
CED
Contactor enable
2-position plug/header
IAM
CPD
Control input power (drive)
2-position plug/header
IAM
DPI
Drive peripheral interface (factory use only)
8-pin mini-DIN
IAM
IOD/AF
User I/O (drive) and auxiliary feedback
44-pin high-density D-shell (female)
IAM/AM
IPD
V ac input power (drive) 230V and dc bus
6-position plug/header
IAM
MF
Motor feedback
15-pin high-density D-shell (female)
IAM/AM
MP Motor
power
4-position
plug/header
IAM/AM
Tx and Rx
SERCOS transmit and receive
SERCOS fiber-optic (2)
IAM/AM
Description
Type
Present on IAM or AM
SERCOS Node Address
(1)
Rotary switches
IAM
SERCOS Baud Rate and Optical Power
DIP switches
IAM and AM
Fault or SERCOS Status
Seven segment LED indicator
IAM and AM
Drive Status
LED indicator
IAM and AM
Communication Status
LED indicator
IAM and AM
Bus Power Status
LED indicator
IAM and AM
(1)
The node address setting for the IAM establishes the base address (n) for that power rail, and the address for the other axis modules (AMs) increment from the base
address (2093-AMPx = n + 1, and 2093-AM0x = n + 2). Refer to the Node Addressing Example 4 on page 108 for information on physical and logical addressing of axis
modules.