Rockwell Automation 2093-xxxx Kinetix 2000 Multi-axis Servo Drive User Manual User Manual
Page 137
Publication 2093-UM001A-EN-P — March 2007
Troubleshooting the Kinetix 2000 Drive System
137
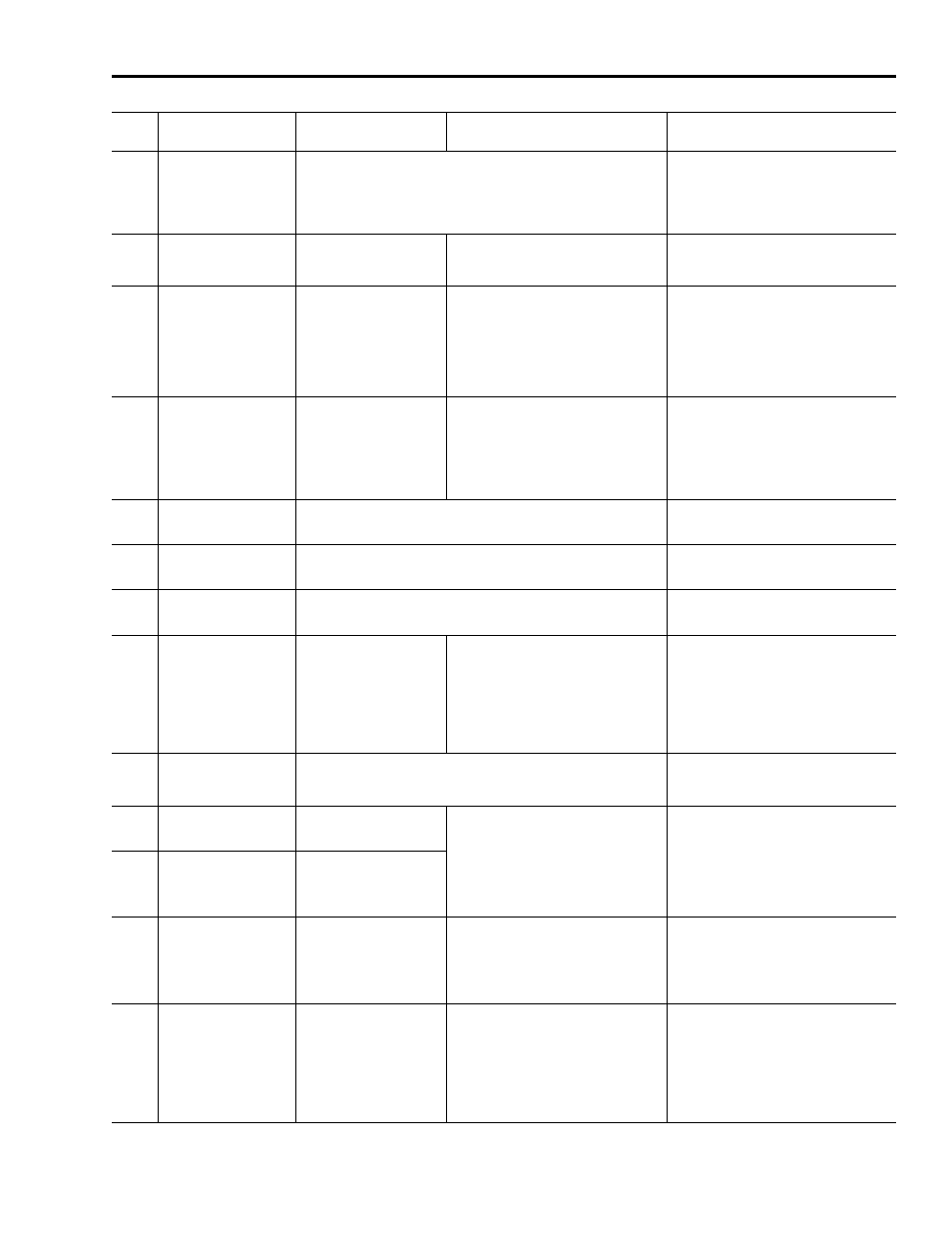
E37
PowerPhaseLoss
Fault
(Phase Loss Flt)
• One or more phases of the input ac power is missing.
• Axis was enabled when main (three-phase) power was removed.
• Common bus follower axis was enabled when dc bus power was
removed.
• Check input ac voltage on all phases.
• Disable axis before removing power.
E38
SERCOSFault
(SERCOS Ring Flt)
The SERCOS ring is not
active after being active
and operational
Cable disconnected.
Check that fiber-optic cable is present and
connected properly.
E39
DriveHardFault
(Self Sense Flt)
Self-sensing Commutation
Startup Error
Motion required for self-sensing startup
commutation was obstructed.
• Verify that there are no impediments to
motion at startup, such as hard limits.
• Increase self-sensing current if high
friction or load conditions exist.
• Check motor or encoder wiring using
wiring diagnostics.
E43
DriveEnableInput
Fault
(Drive Enable Flt)
Missing Drive Enable Input
Signal
• An attempt was made to enable the
axis through software while the Drive
Enable hardware input was inactive.
• The Drive Enable input transitioned
from active to inactive while the axis
was enabled.
• Disable the Drive Enable Input fault.
• Verify that Drive Enable hardware input
is active whenever the drive is enabled
through software.
E50
SERCOSFault
(SERCOS Same ADDR)
Duplicate node address detected on SERCOS ring.
Verify that each SERCOS drive is assigned
a unique node address.
E54
DriveHardFault
(Ifbk HW Fault)
Current feedback hardware fault detected.
Replace the module.
E60
DriveHardFault
(Unknown Axis)
Illegal ID bits detected.
Replace the module.
E61
AuxFeedbackFault
(Aux Fdbk AQB)
Auxiliary Encoder State
Error
The auxiliary encoder encountered an
illegal transition.
• Use shielded cables with twisted pair
wires.
• Route the feedback away from
potential noise sources.
• Check the system grounds.
• Replace the motor/encoder.
E62
AuxFeedbackFault
(Aux Fdbk Loss)
The feedback wiring is open, shorted, or missing.
Check the motor feedback cable
connectors/wiring to the IAM/AM and
motor.
E63
AuxFeedbackNoise
(Aux Fdbk Noise)
Noise on auxiliary
feedback cable
Recommended grounding, per
installation instructions, has not been
followed.
• Verify grounding.
• Route feedback cable away from noise
sources.
• Refer to System Design for Control of
Electrical Noise Reference Manual,
publication GMC-RM001.
E64
MotorFeedbackNoise
(Mtr Fdbk Noise)
Noise on motor feedback
cable
E65
No Fault Message
(condition indicated
by on-screen
message)
(Hookup Fault)
Hookup procedure failed
Motor or feedback device malfunction.
• Check motor power/feedback wiring.
• Refer to on-screen message for
resolution.
E66
No Fault Message
(condition indicated
by on-screen
message)
(Atune Flt)
Autotune procedure failed
Motor or feedback device malfunction.
• Check motor power/feedback wiring.
• Refer to on-screen message for
resolution.
• Perform Hookup in RSLogix 5000
software.
• Consult RSLogix 5000 help screen.
Error
Code
Fault Message
RSLogix (HIM)
Problem or Symptom
Potential Cause
Possible Resolution