Motor encoder output signal, Quadrature interface specifications – Rockwell Automation 1398-DDM-xxx ULTRA 100 Series Drives Installation Manual User Manual
Page 86
Publication 1398-5.2 – PDF 1997
6-22
Interfaces
To improve noise immunity, a cable shield should terminate at both
ends of the cable. Shields should connect to the backshell of the
connectors with termination around the full circumference (360°). The
connectors should attach to chassis ground (not signal common).
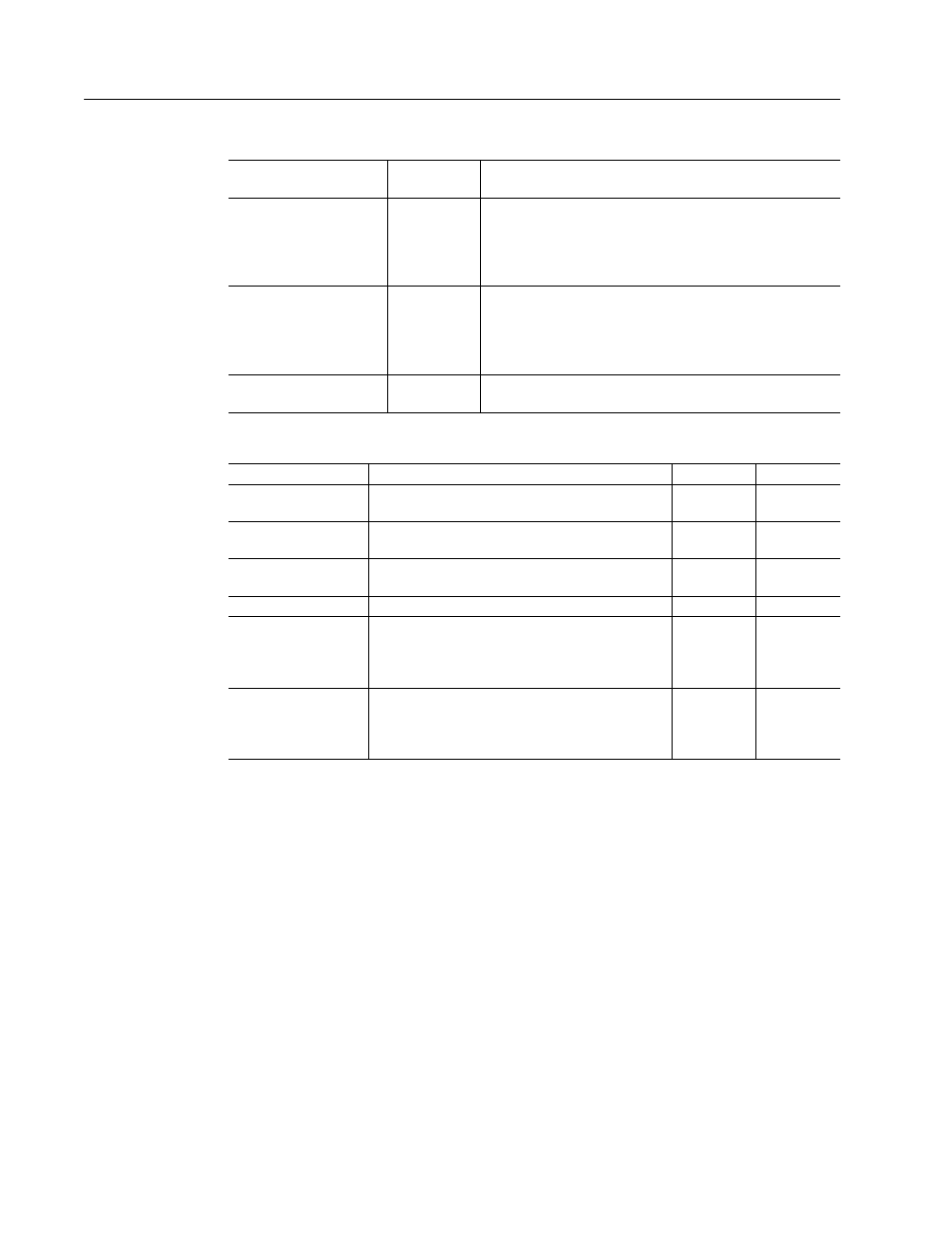
Table 6.19:
Motor Encoder Output Signal
Auxiliary Encoder
Input
Pin Number
Description
AX + and AX-, or
Step + and Step-, or
CW+ (Step Up+)
and
CW- (Step Up-)
J1-14 (+)
J1-15 (-)
Auxiliary Channels A(+) and A(-). Differential, quadra-
ture, or TTL level encoder input. The signal input and
resolution are selectable.
BX (+) and BX(-), or
DIR (+) and DIR(-), or
CCW+ (Step Down+)
and
CCW- (Step Down-)
J1-16 (+)
J1-17 (-)
Auxiliary Channels B(+) and B(-). Differential, quadra-
ture, or TTL level encoder inputs. The signal input and
resolution are selectable.
IX (+) and IX (-)
J1-18 (+)
J1-19 (-)
Auxiliary Input Channels I(+) and I(-). Differential,
quadrature, or TTL level encoder inputs.
Table 6.20:
Quadrature Interface Specifications
Specification
Description
Minimum
Maximum
ON State Voltage
Voltage difference between the + and - inputs
that indicate an ON state.
1.0 Volts
+15 Volts
OFF State Voltage
Voltage difference between the + and - inputs
that indicates an OFF state.
-1.0 Volts
-15 Volts
Common Mode Volt-
age
Voltage difference between an encoder signal
input and the reference ground of the drive.
-15 Volts
+15 Volts
Current Draw
Current draw into the + input or - input
-5 mA
+5 mA
A or B Signal
Frequency
Frequency of the A or B line inputs. Count fre-
quency is 4 times this frequency, since the cir-
cuitry counts each of the four transitions in a
single line.
1 MHz
Index Pulse Width
Pulse width of the index signal. The index sig-
nal is active for a percentage of the revolution,
therefore the speed of the encoder dictates the
pulse width.
500 nsec