Velocity loop gains, Position loop gains – Rockwell Automation 1398-DDM-xxx ULTRA 100 Series Drives Installation Manual User Manual
Page 173
Publication 1398-5.2 – PDF 1997
Tuning
9-7
●
Step Velocity value to be specified.
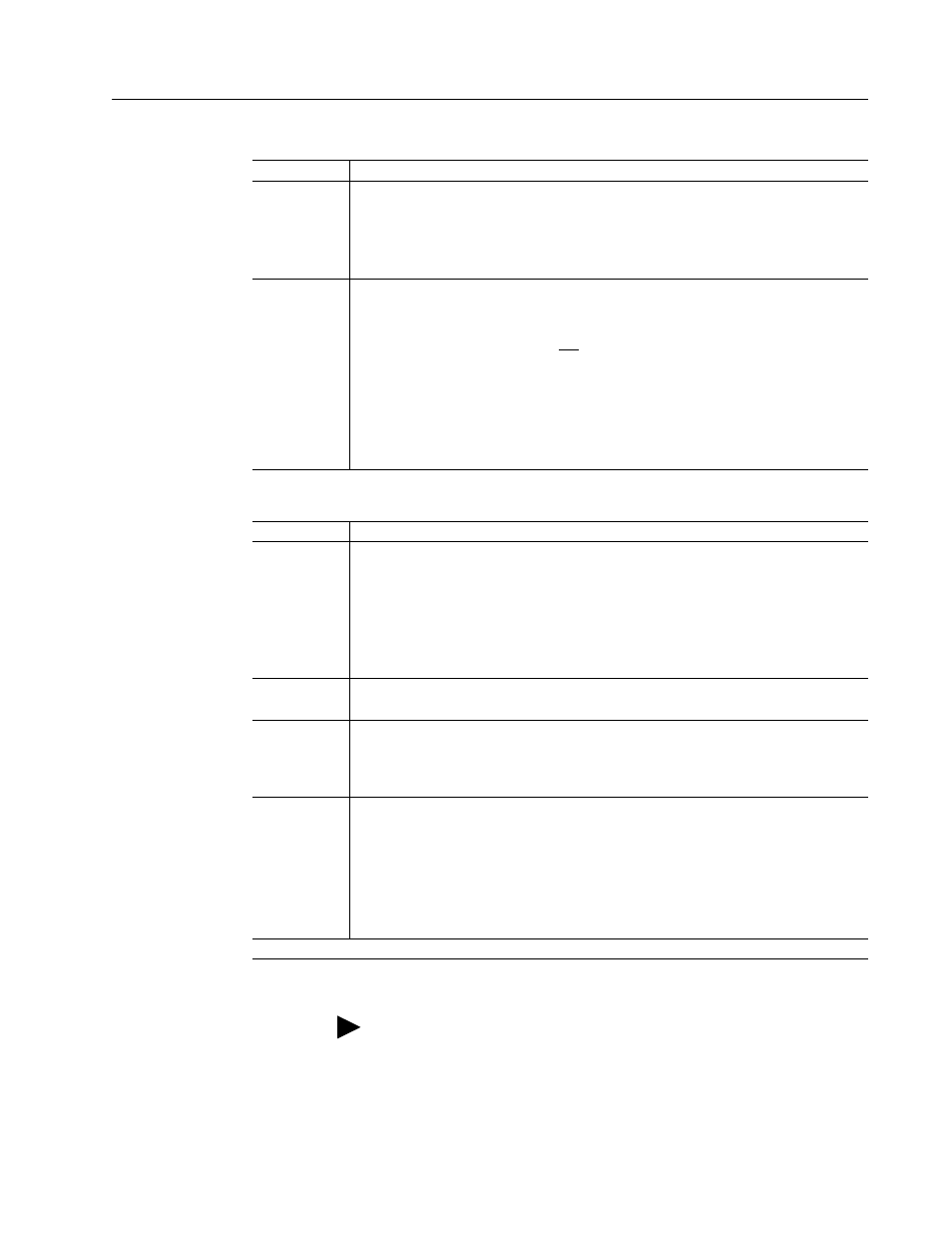
Table 9.1:
Velocity Loop Gains
Parameter
Description
P-gain
Proportional gain of the velocity regulator.
P-gain controls the bandwidth of the velocity regulator by adjusting the control
response proportional to the error.
The P term of the velocity regulator commands an acceleration current that is pro-
portional to the velocity error.
I-gain
Integral gain of the velocity regulator.
Integration in the velocity regulator forces the motor velocity to precisely follow the
commanded velocity. This assumes operation under steady state conditions
(velocity command or load does not change).
I-gain controls:
• The stiffness or the ability to reject load torque disturbance.
• The amount of velocity overshoot, which may cause the system to become unstable or
oscillate.
The I term of the velocity regulator commands an acceleration current proportional
to the integral of the velocity error.
Table 9.2:
Position Loop Gains
Parameter
Description
Kp-gain
Proportional gain of the position loop.
Kp-gain changes:
• The position loop bandwidth.
• The settling time of the position loop.
In general, the higher the value of Kp-gain the faster the settling time. However, a
high value of Kp-gain with inadequate velocity loop bandwidth results in overshoot
and ringing.
Kd-gain
Differential gain of the position loop.
Provides position loop damping and reduces overshoot caused by Kp or Ki gain.
Kff-gain
Feedforward gain of the position loop.
Kff-gain reduces following error. However, a high value of Kff-gain can result in
position overshoot. A reduction in following error allows the system to more closely
approximate gear driven systems.
Ki-gain
Integral gain of the position loop.
Ki-gain decreases the time period for the error to decay.
A non-zero value of Ki allows integration in the position loop which eliminates the
steady state following error. However, a non-zero value for Ki may introduce over-
shoot and ringing, which cause system instability (oscillation).
NOTE: Ki-gain is used in conjunction with the Ki Zone value.
Ki Zone is the area around the commanded position where Ki-gain is active.
NOTE: Position Loop Gains are used in the Position Following mode only.
Note: Always tune the velocity loop before the position loop, as Veloc-
ity loop tuning affects the position loop response.