3 notes on the robo gripper, Notes on the robo gripper – IAI America RCP2-CF User Manual
Page 93
73
6.3
Notes on the ROBO Gripper
(1) Finger
operation
[1] Definition of position
With the two-finger type, the stroke in the specification represents the sum of travels of both fingers.
Therefore, the travel of one finger is one-half the stroke.
The position is specified as a travel of one finger from the home toward the closing side.
Accordingly, the maximum command value is 5 mm for the GRS type and 7 mm for the GRM type.
[2] Definition of speed and acceleration
The command value applies to each finger.
With the two-finger type, therefore, the relative speed and acceleration are twice their respective
command values.
[3] Operation mode in gripper applications
When the actuator is used to grip the load, be sure to select the “push & hold mode.”
(Note) In the “positioning mode,” a servo error may occur while the load is gripped.
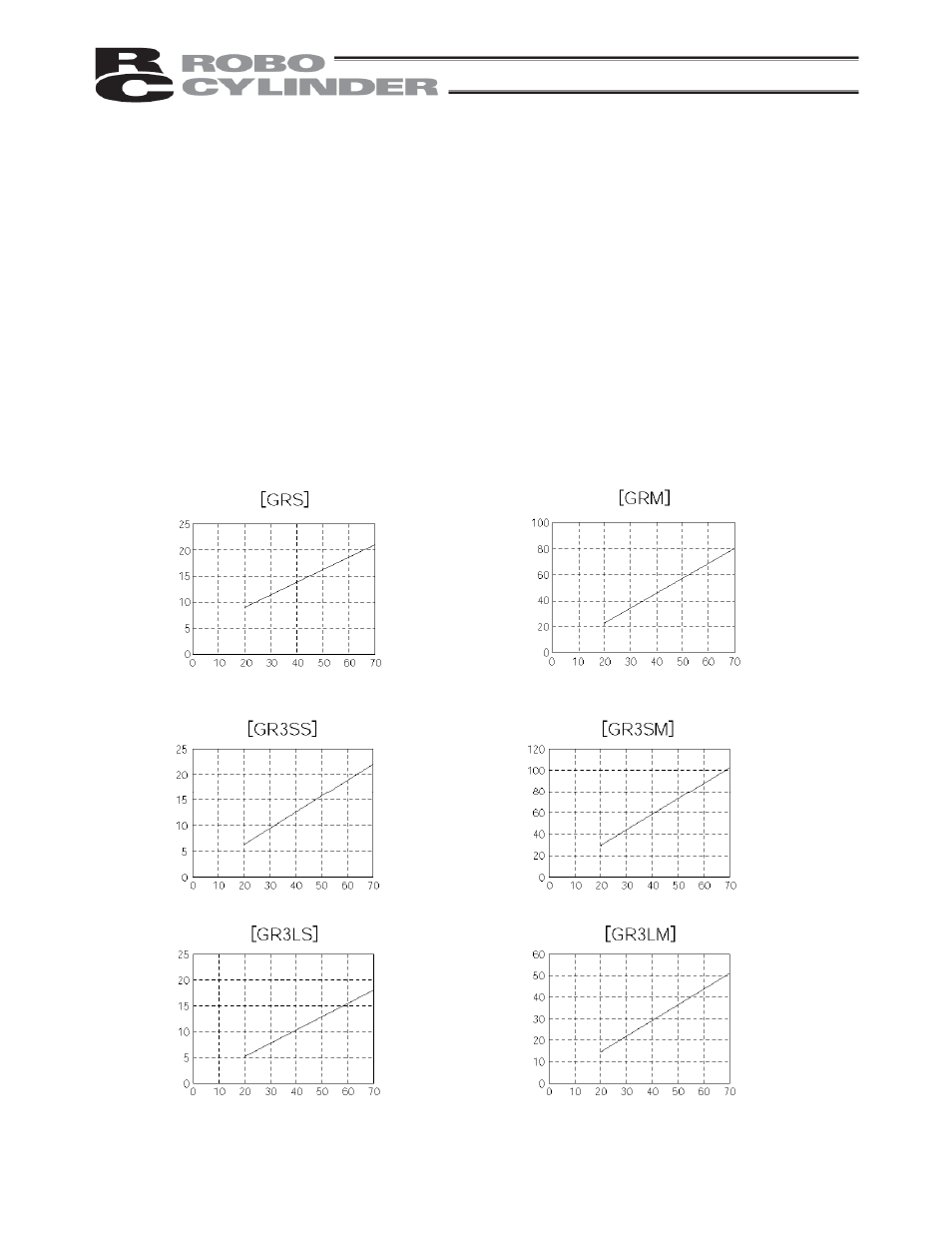
[Diagrams of gripping force and current-limiting value]
Current-limiting value (ratio in %)
Current-limiting value (ratio in %)
Gripping fo
rce (N
)
Gripping fo
rce (N
)
Gripping fo
rce (N
)
Gripping fo
rce (N
)
Gripping fo
rce (N
)
Gripping fo
rce (N
)
Current-limiting value (ratio in %)
Current-limiting value (ratio in %)
Current-limiting value (ratio in %)
Current-limiting value (ratio in %)