Current-limiting value during home return, Direction of excitation phase signal detection – IAI America RCP2-CF User Manual
Page 133
113
Current-limiting value at standstill during positioning
The factory setting conforms to the standard specification of the actuator.
Increasing this setting will increase the holding torque at standstill.
This setting need not be changed in normal conditions of use. However, to prevent hunting caused by large
external force applied while the actuator is at standstill, the value set in parameter No. 12 must be increased.
(Do not increase the value beyond 70%.)
Current-limiting value during home return
The factory setting conforms to the standard specification of the actuator.
Increasing this setting will increase the home return torque.
This setting need not be changed in normal conditions of use. However, if an increased slide resistance causes
the home return to complete before the correct position depending on the affixing method, load condition or other
factor when the actuator is used in a vertical application, the value set in parameter No. 13 must be increased.
(As a guide, set the upper limit to 100% for the RXA type and 75% for all other types.)
Direction of excitation phase signal detection
After the power has been turned on, excitation phase detection is performed when the servo is turned on for the
first time. This parameter defines the direction in which this detection is performed.
This setting need not be changed in normal conditions of use. However, if the actuator is contacting the
mechanical end or any other obstacle and cannot be moved by hands when the power is on, you should change
the setting to a direction that allows the motor to operate easily.
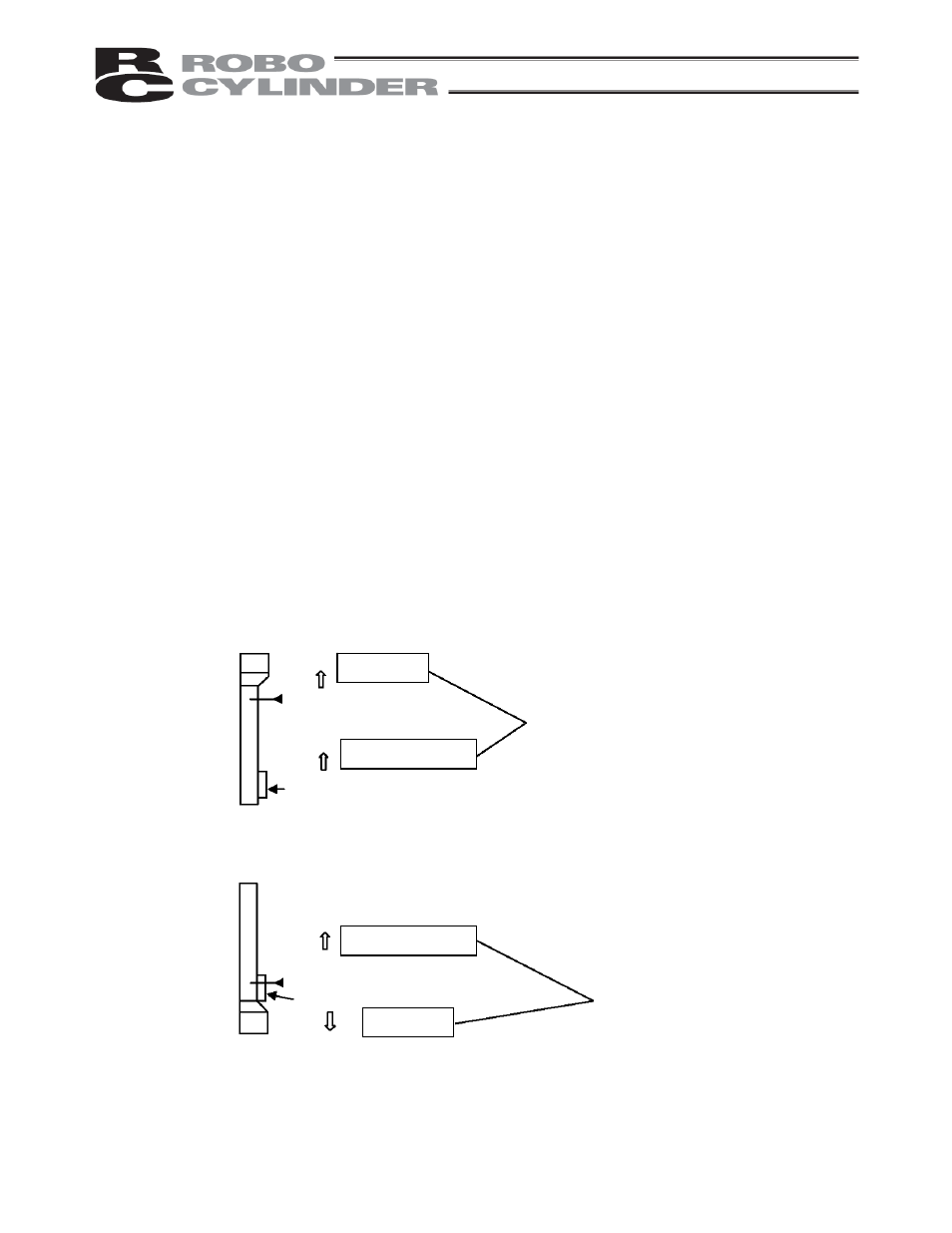
Set the value of parameter No. 28 to “0” or “1.” If the detection direction should be the same as the home return
direction, set in this parameter the same value currently set in parameter No. 5, “Home return direction.”
To set the direction opposite to the home return direction, set the value different from the one currently set in
parameter No. 5, “Home return direction.”
(Example 1) The power is turned on when the vertically positioned slider is contacting the bottom mechanical
end, with the motor installed on top.
(Example 2) The power is turned on when the vertically positioned slider is contacting the bottom mechanical
end, with the motor installed at bottom.
* This parameter is supported by PC software version 5.0.1.0 or later, as well as teaching pendant RCA-T
version 1.67 or later, RCA-E/P version 1.67 or later and RCB-J version 1.04 or later.
Set the same value.
Set different values.
Top
Bottom
Top
Bottom
Home position
The slider is contacting the bottom mechanical end.
Home return
direction
Direction of excitation
phase signal detection
Home position
The slider is contacting the bottom mechanical end.
Home return
direction
Direction of excitation
phase signal detection