8 teaching mode (jogging/teaching using pio), Teaching mode (jogging/teaching using pio) – IAI America RCP2-CF User Manual
Page 90
70
6.2.8
Teaching Mode (Jogging/Teaching Using PIO)
The actuator can be jogged using PIO if parameter No. 25 (PIO pattern) is set to “4: [Teaching].” The current
actuator position can also be read into the controller’s position-data table using PIO.
Switching between the normal positioning mode (including the push & hold mode) and the teaching mode is
implemented by turning ON/OFF the operation mode input. Among the PIO signals, the +jog and *pause inputs,
–jog and reset inputs, current-position write and start inputs, and write completion and position complete outputs
use the same terminal, respectively, and are toggled in accordance with ON/OFF of the operation mode input.
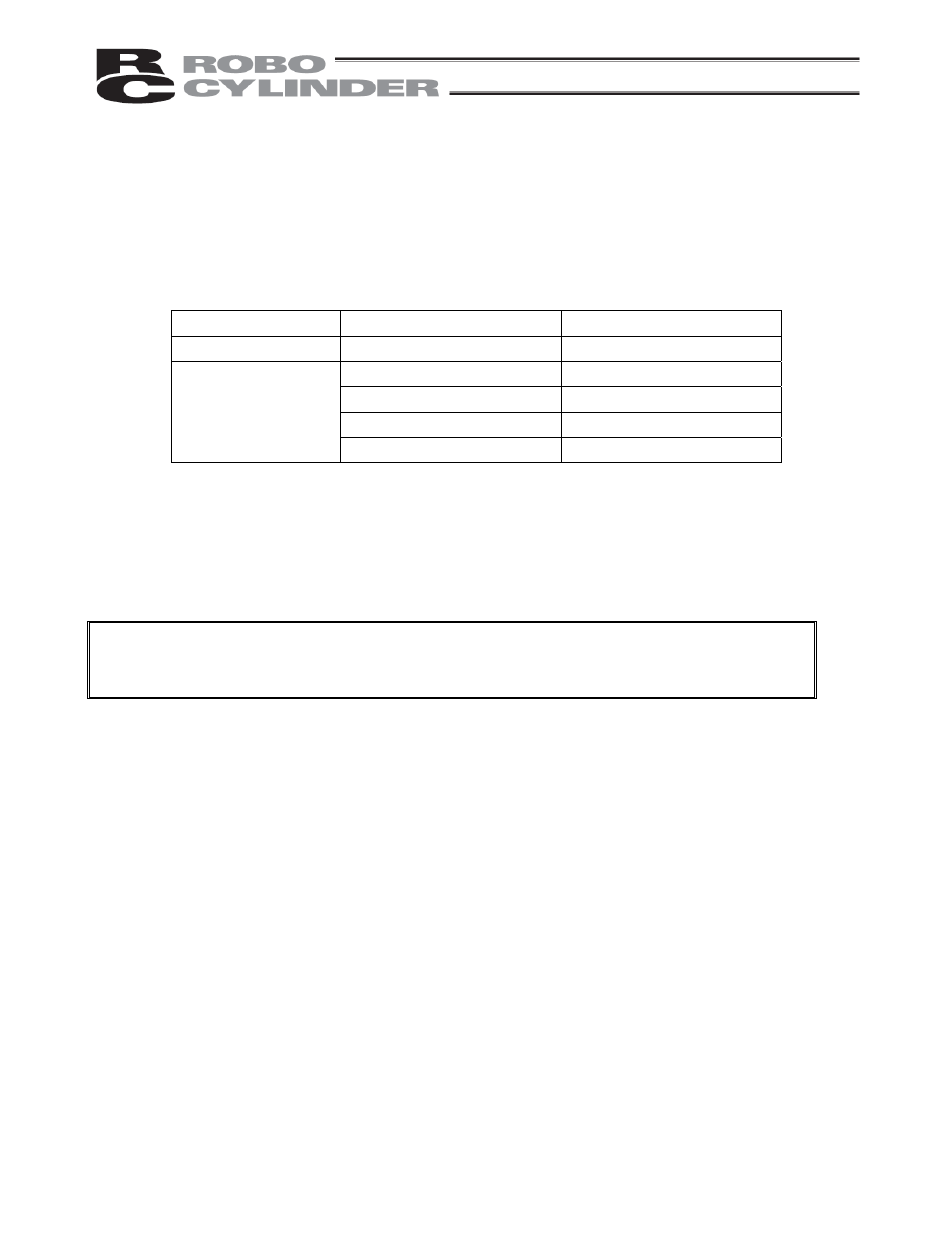
Operation mode input
ON
OFF
Mode
Teaching mode
Positioning mode
+Jog input
*Pause input
–Jog input
Reset input
Current-position write input
Start input
PIO
Write completion output
Position complete output
Among the PIO signals, use the +jog/–jog inputs to move the actuator, and use the current-position write input to
write the current actuator position to the position-data table. When the writing is complete, the write completion
output will turn ON.
For details, refer to 7.12, “Jogging/Teaching Using PIO.”
Note: Be sure to enable the pause signal using parameter No. 15 (by setting the parameter to “0”)
(the pause signal is enabled at the factory). The system cannot switch to the teaching mode if
the pause signal is disabled (i.e., the above parameter is set to “1”).