P l c – IAI America RCP2-CF User Manual
Page 113
93
7.7
Operation at Different Acceleration and Deceleration Settings
Example of use in operation) Positioning is performed to the position 150 mm from the home (position 1) at a
speed of 200 mm/sec. The actuator will accelerate at the maximum acceleration
and decelerate at 0.1 G.
Method) Entering “1” under “Acceleration only MAX” in the position data will automatically
adjust the acceleration to the maximum acceleration.
Entering “0.1” under “Acceleration/deceleration” in the position data will set the
deceleration to 0.1 G.
RCP2 controller
P
L
C
[5] [2]
[1]
[7]
[6] [3]
[8] [4]
PIO
Signal name
Start
Command position 1
Command position 2
Command position 4
Command position 8
*Pause
Reset
Servo ON
Completed position 1
Completed position 2
Completed position 4
Completed position 8
Position complete
Home return completion
Zone
*Alarm
Ready
Moving
Category
Input
Output
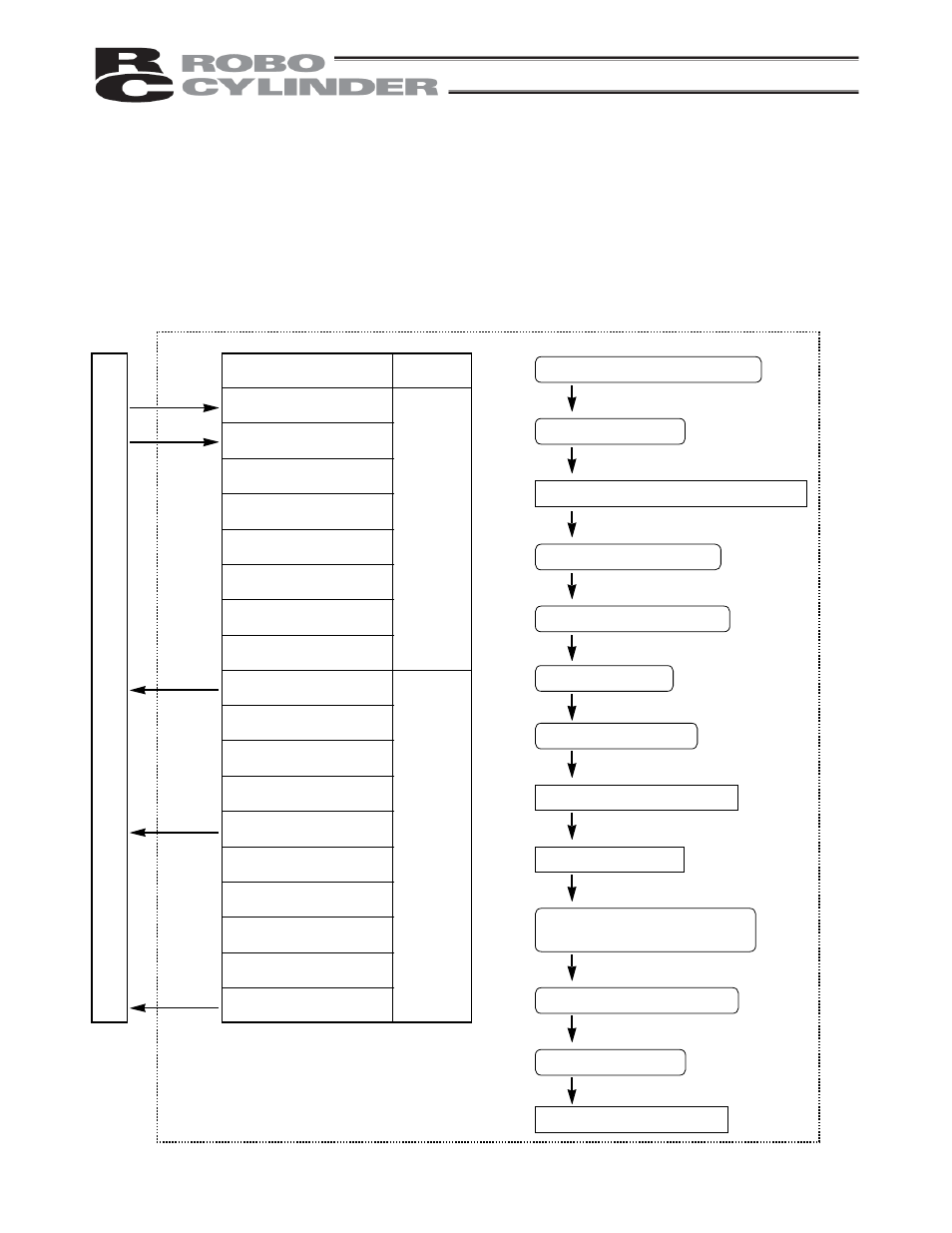
Reference flow
Select/enter command position 1.
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
Start input ON
Completed position OFF
Position complete output OFF
Moving output ON
Start input OFF
Moving output OFF
Movement to position 1 completes.
Position complete output turns ON
0.1 mm before position 1.
Completed position 1 is output.
Movement to position 1 starts at the maximum
acceleration.
Moves at constant speed (200 mm/sec).
Decelerates at 0.1 G.