IAI America RCP2-CF User Manual
Page 128
108
Handling of the pause (*STP) signal
This signal is a contact B signal, meaning that it must remain ON while the actuator is moving.
If the pause signal turns OFF while the actuator is moving, the actuator will decelerate to a stop.
The actuator will start moving when the signal turns ON again.
Use this signal as an interlock that actuates when an operator entry prohibition sensor or contact prevention sensor is
activated.
If the pause signal is not to be used, set parameter No. 15 (Pause input disable selection) to “1,” and the
actuator will move even when this signal is OFF.
(Note)
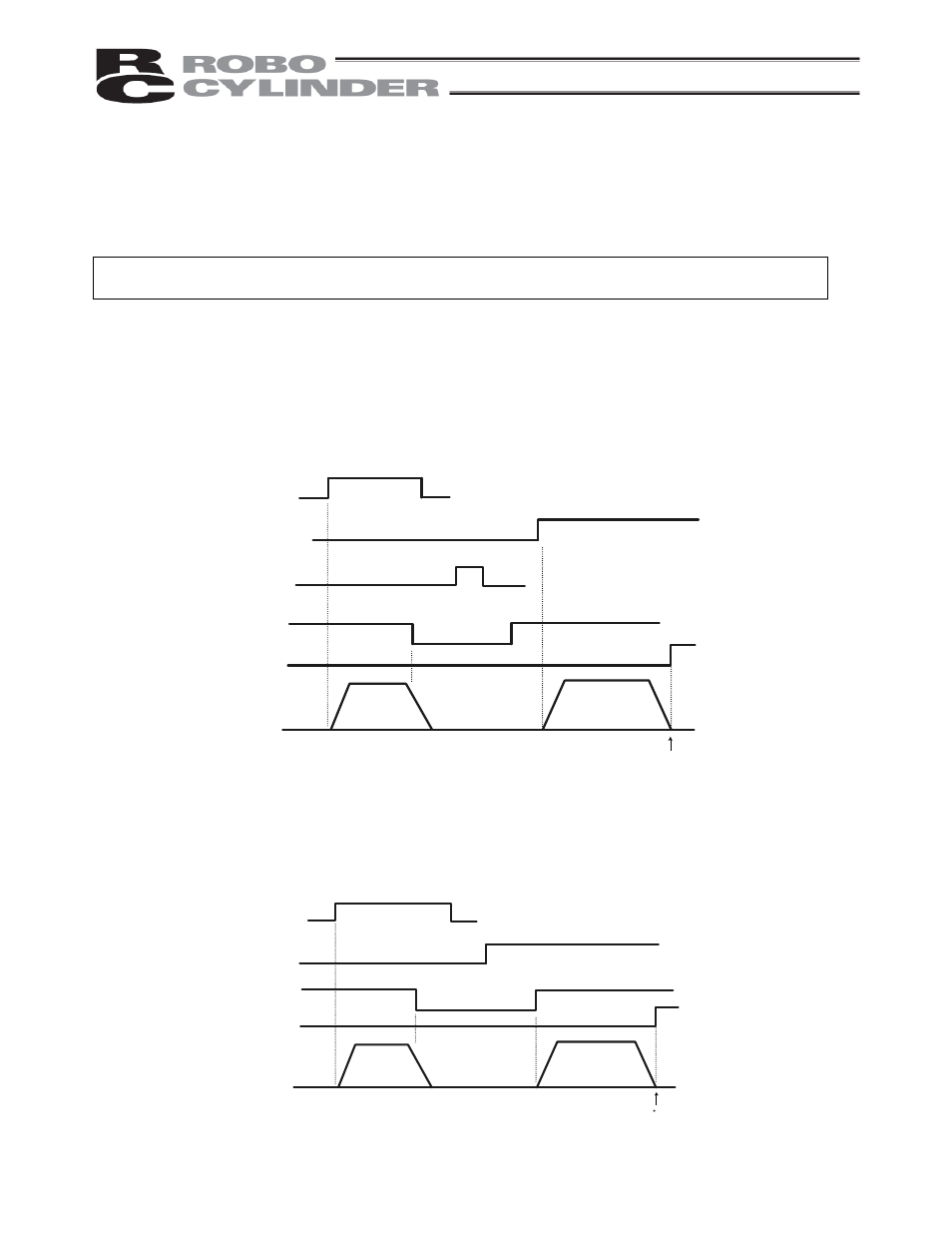
When the “edge mode” is selected as the movement command type, you can change the target position
while the actuator is stopped with this signal turned OFF, as follows:
[1] Input a reset signal (RES) for 6 msec or more to cancel the remaining travel.
Next, turn ON the pause signal, and then input a movement command specifying the new target position.
(Example)
If the pause signal is turned OFF while the actuator is moving following the input of an
intermediate point 1 move command, the accelerator will decelerate to a stop.
Turn OFF the intermediate point 1 move signal, and then turn ON the reset signal for 6
msec or more.
Turn ON the pause signal again, and then input the front end move signal.
[2] After inputting a movement command specifying the new target position, turn ON the pause input.
(Example)
If the pause signal is turned OFF while the actuator is moving following the input of an
intermediate point 1 move command, the accelerator will decelerate to a stop.
Turn OFF the intermediate point 1 move signal, and turn ON the front end move signal.
When the pause signal is turned ON again, the controller will recognize the front end as the
new target position.
Intermediate point 1 move
Front end move
Reset
Pause
Front end complete
Actuator movement
(ON for 6 msec or more)
Stopped
The front end becomes the target position.
Intermediate point 1 move
Front end move
Pause
Front end complete
Actuator movement
Stopped
The front end becomes the target position.