12 jogging/teaching using pio, Jogging/teaching using pio, P l c – IAI America RCP2-CF User Manual
Page 123
103
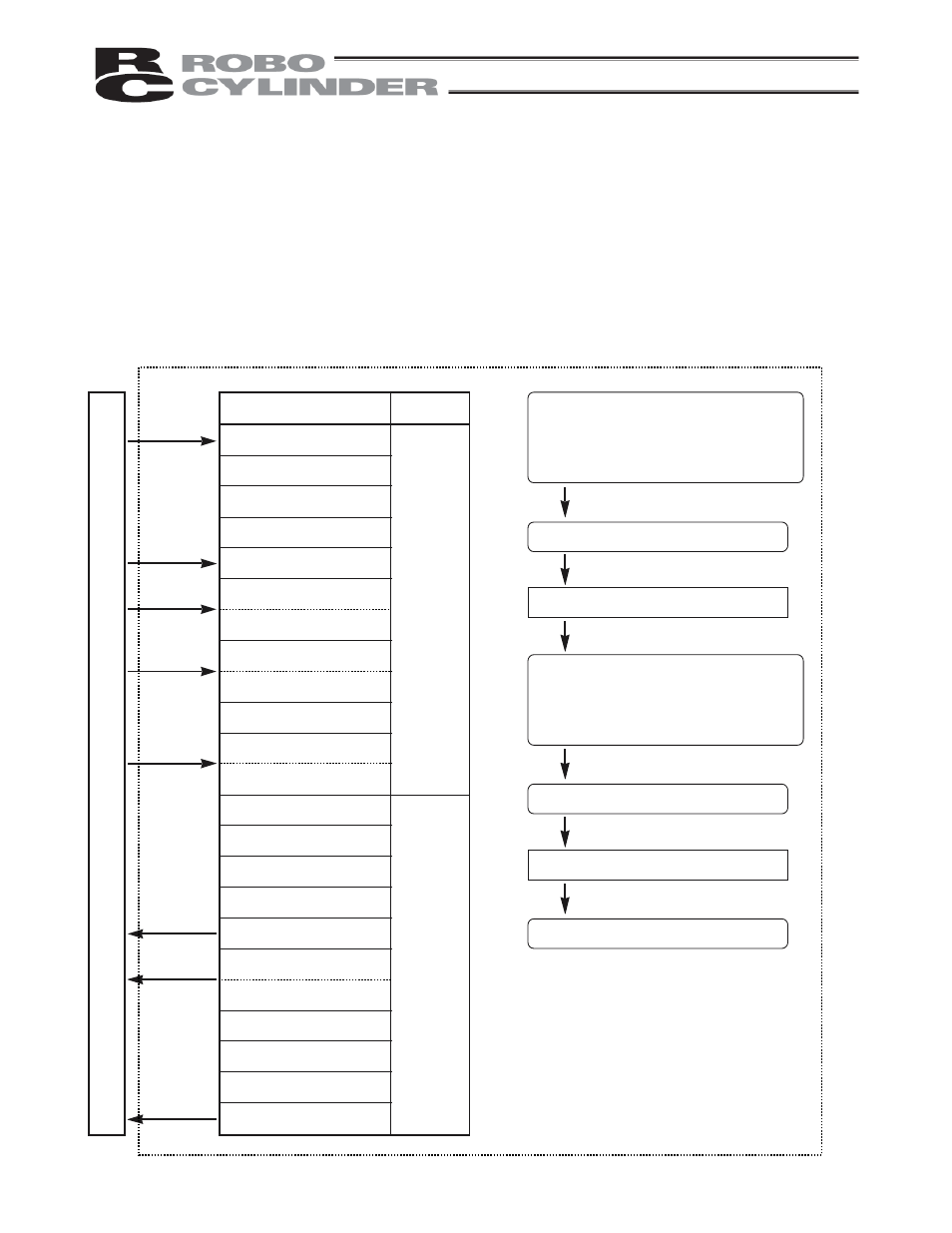
7.12 Jogging/Teaching Using PIO
First, cause the position complete signal to turn ON by referring to 7.1, “How to Start.”
If parameter No. 25 (PIO pattern) is set to “4: [Teaching],” the actuator can be jogged using PIO. The current
actuator position can also be read into the controller’s position table using PIO.
When reading the current position into the position table, all data other than position (speed, acceleration, etc.), if
not already defined, will be automatically set to the default values in the applicable parameters.
Note)
If a teaching pendant is connected (PORT is ON), the current position cannot be read into the position
table.
Example of use in operation)
The actuator is caused to move using the +jog input or –jog input and the
current position is read into position No. 1.
RCP2 controller
P
L
C
[4]
[2]
[4] [1]
[7] [5] [1]
[4] [1]
[3]
[6]
PIO
Signal name
Command position 1
Command position 2
Command position 4
Command position 8
Operation mode
+Jog
*Pause
Current-position write
Start
Servo ON
–Jog
Reset
Completed position 1
Completed position 2
Completed position 4
Completed position 8
Current operation mode
Write completion
Position complete
Home return completion
*Alarm
Ready
Moving
Category
Input
Output
*Pause input OFF
Reset input OFF
Start input OFF
Operation mode input ON
Current operation mode output ON
Move the actuator using +jog input or
–jog input.
Select/enter command position 1.
Current-position write input ON
Write completion output ON
Current-position write input OFF
Reference flow
[1]
[2]
[3]
[4]
[5]
[6]
[7]