HEIDENHAIN TNC 335 Technical Manual User Manual
Page 151
4-54
TNC 360
3 Servo Positioning of the NC Axes
8/95
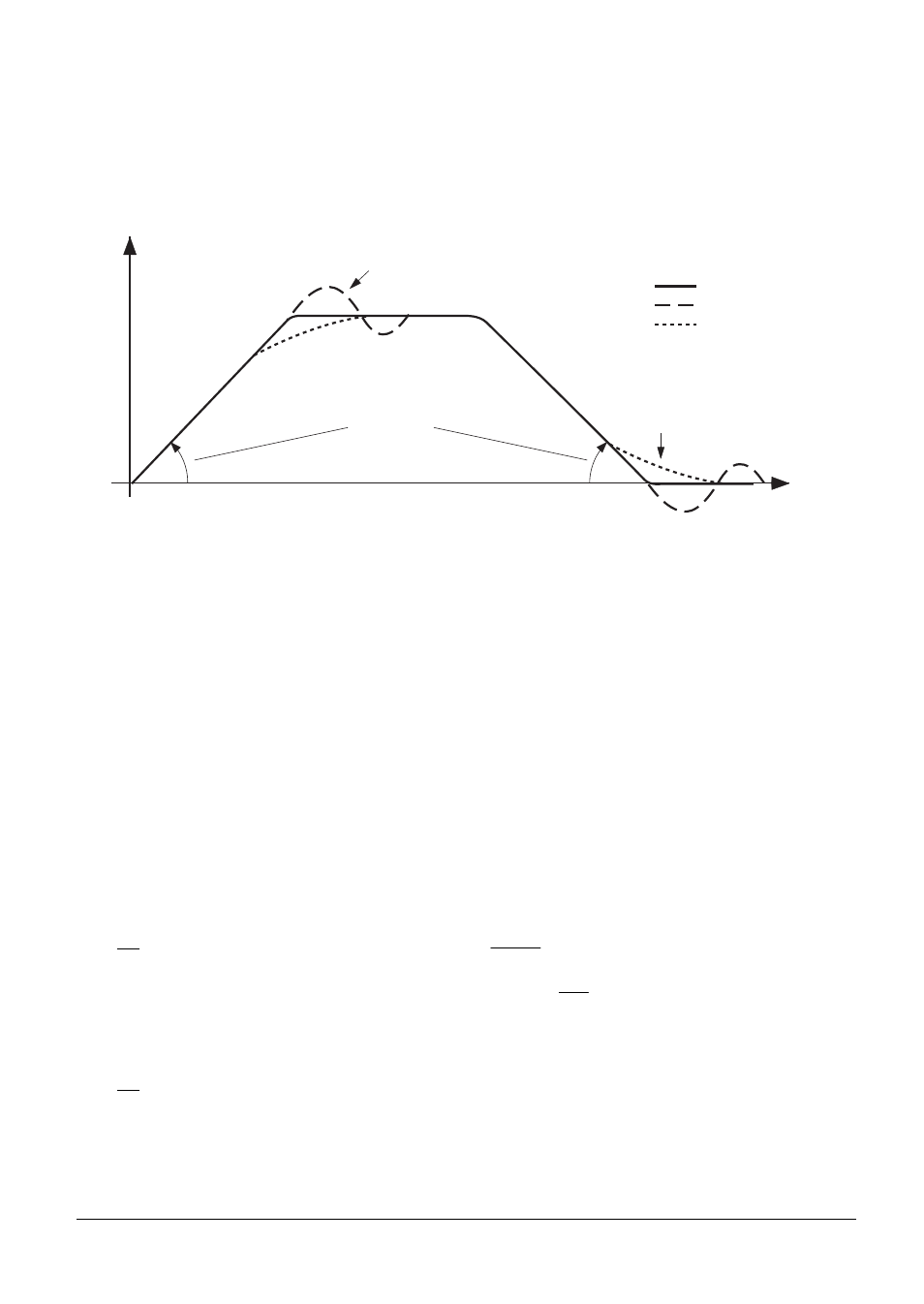
The k
v
factor (position loop gain) determines the control loop response of the machine, and it must
be matched to the machine.
If a very high k
v
factor is chosen, the lag is very small. However, this can lead to an overshoot when
running into a new position. If the k
v
factor is too small the new position will be reached too slowly.
The optimal k
v
factor must be determined by experiment (see the section "Commissioning and start-
up procedure"). The following diagram shows the response for various k
v
factors.
U [V]
t [s]
MP1060
MP1810
MP1810
kv correct
kv too large
kv too small
The acceleration can be programmed by the machine parameter MP1060. It determines the slope of
the ramp on the rising and falling edges.
For axes which are mutually interpolated the k
v
factor must be the same, in order to avoid contour
distortion!
MP1060
Acceleration
Input value 0.001 to 3.0 [m/s
2
]
MP1060.0
Acceleration X axis
MP1060.1
Acceleration Y axis
MP1060.2
Acceleration Z axis
MP1060.3
Acceleration 4th axis
The K
v
factor MP1810 is, in general, determined by the rapid traverse (MP1010) of the machine and
the lag, using the following formula:
k
v
=
Ve
s
a
k
v
= Position loop gain
[
m/min
mm
]
v
e
= Rapid traverse
[
m
min
]
s
a
= Servo lag
[mm]
or
s
a
=
Ve
k
v
[mm]