9 installing adjustable hardstops – Adept s600 Cobra User Manual
Page 88
Chapter 6: Optional Equipment Installation
l
Signal - the input or output signal number (e.g. 1013 or 013) where mapping
starts.
l
Bit_length - the number of input or output signals to map.
l
MACID - the MACID returned by the Scan.
8. When you are finished, click Done.
9. Check that the assignments worked correctly by opening the Digital I/O tab.
The new signals should show up as being mapped now.
Recommended Vendors for Mating Cables and Connectors
A variety of vendors have molded cable assemblies for the Micro-style connector including
Brad Harrison, Crouse Hinds, Lumberg, Turk, and others. In addition, Hirshmann, Phoenix
Contact, and Beckhoff have mating micro connectors that have screw terminals in the plug to
allow the user to make custom cables.
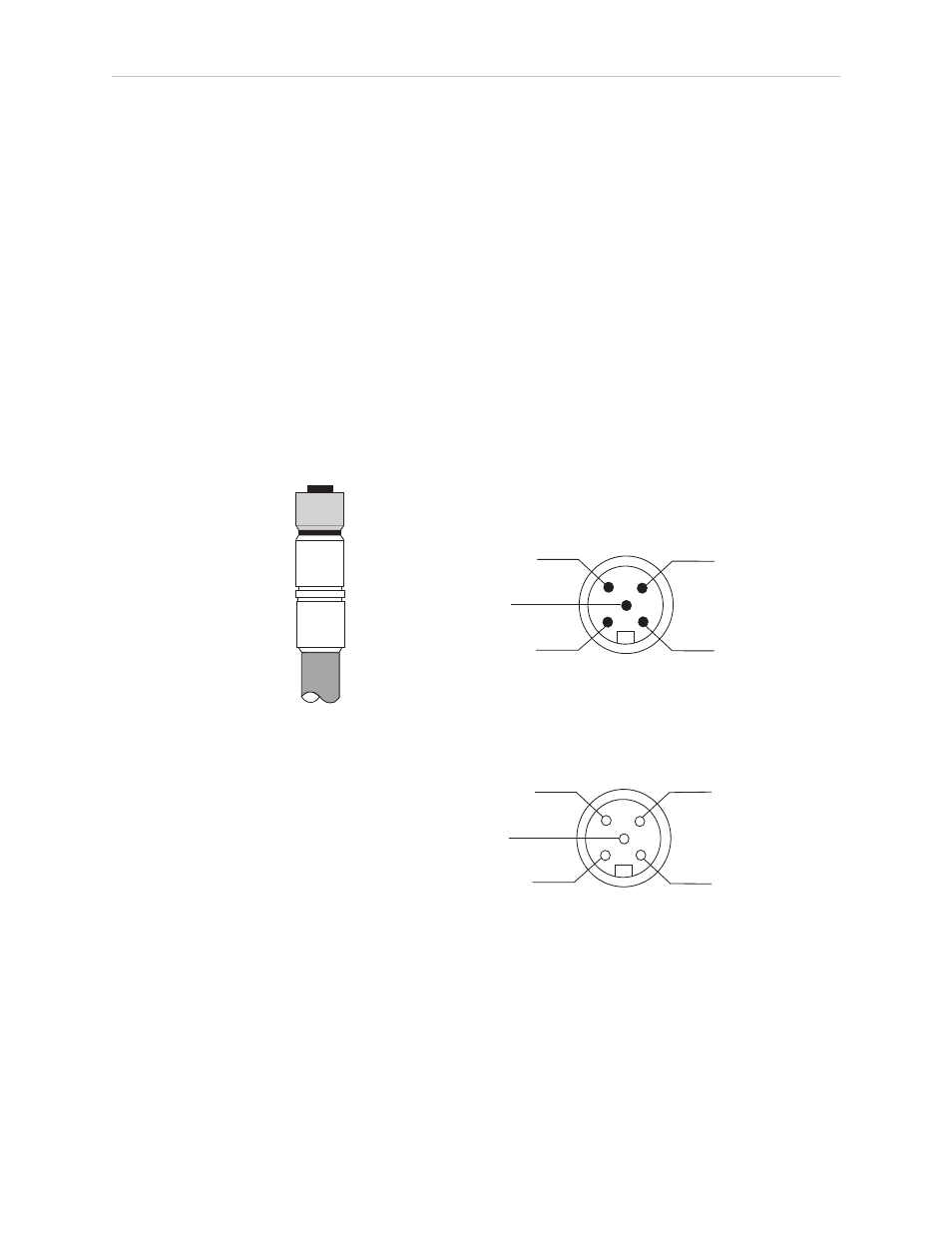
Male Connector (pins)
Female Connector (sockets)
4
3
5
1
2
3
5
2
4
1
Micro-Style
Connector
LEGEND:
1 Drain (bare)
2 V+ (red)
3 V- (black)
4 CAN_H (white)
5 CAN_L (blue)
(VIEWED FROM CONTACT END)
Figure 6-15. Micro-Style Connector Pinouts for DeviceNet
6.9 Installing Adjustable Hardstops
Adept offers an adjustable hardstop kit for Joint 1 and Joint 2 on the Adept Cobra s600/s800
robots. These are user-installed options that can be used to limit the work envelope of the
robot. The Adept part number for the kit is 02592-000.
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 88 of 128