Estop connector – Adept s600 Cobra User Manual
Page 77
Chapter 6: Optional Equipment Installation
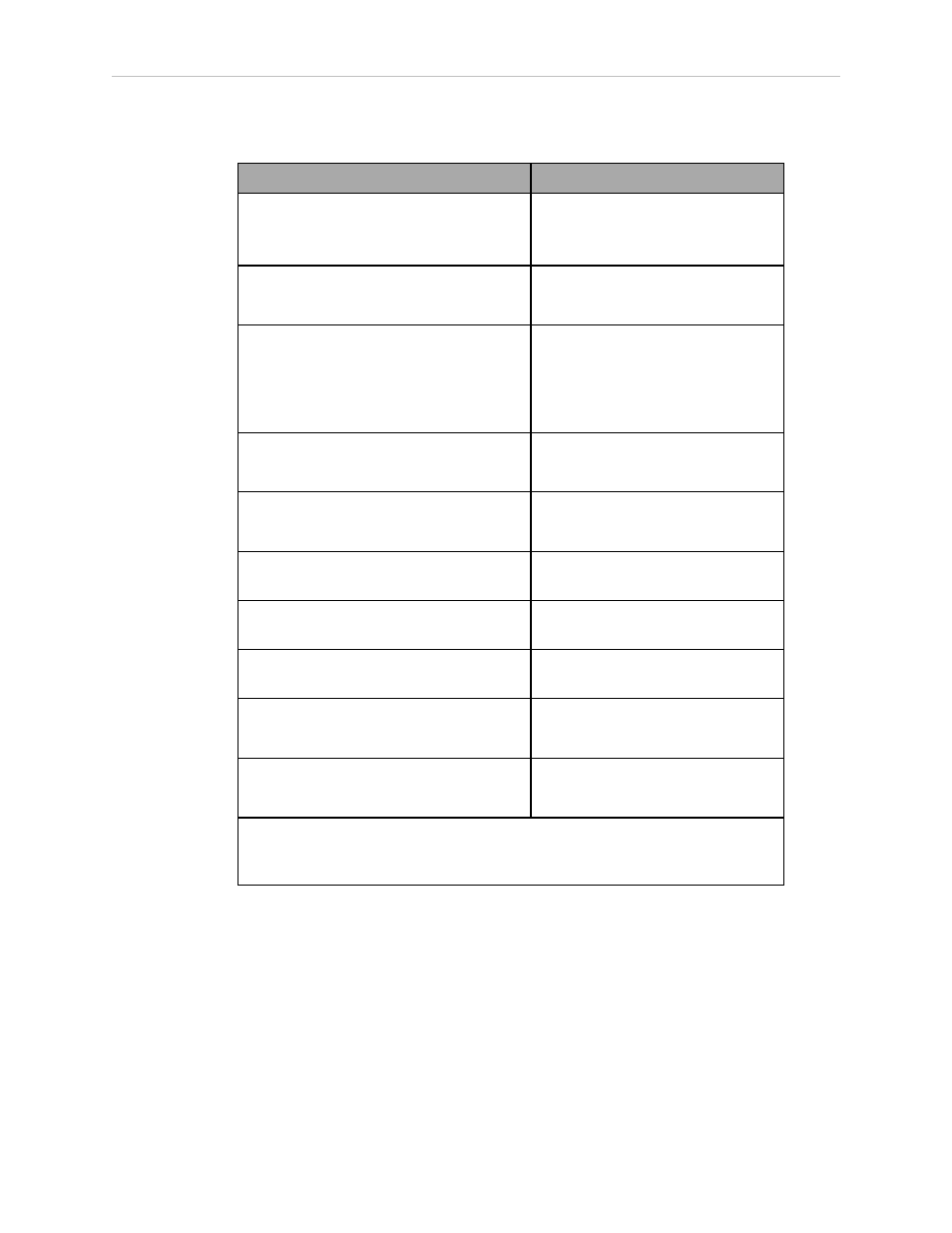
Table 6-4. Internal User Connector Output Circuit Specifications
Parameter
Value
Power supply voltage range
24 VDC
±
10%
See Specifications for 24 VDC
Power on page 28.
Operational current range, per channel
I
out
≤
700 mA
Total Current Limitation, all channels
on
a
I
total
≤
1.0 A @ 50° C ambient
I
total
≤
1.5 A @ 25° C ambient
On-state resistance (I
out
= 0.5 A)
R
on
≤
0.32
Ω
@ 85
°
C
Output leakage current
I
out
≤
25 µA
Turn-on response time
125 µsec. max., 80 µsec typical
(hardware only)
Turn-off response time
60 µsec. max., 28 µsec typical
(hardware only)
Output voltage at inductive load turnoff
(I
out
= 0.5 A, Load = 1 mH)
(+V - 65)
≤
V
demag
≤
(+V - 45)
DC short circuit current limit
0.7A
≤
I
LIM
≤
2.5 A
Peak short circuit current
I
ovpk
≤
4 A
a
NOTE: Total current is the sum of the output current used by output
signals 3001-3004 (SOLND and OP3/4) and any user current drawn from
EOAPWR.
ESTOP Connector
The Break-away E-STOP function is provided to enable a high power shutdown from the outer
link area. For example, it would be used if you want a break-away gripper to shut down robot
high power. It lets you disable high power through a user relay circuit inside the robot.
The 2-pin ESTOP connector provides a pair of contacts that can be used for a Break-away E-
Stop function at the end of the arm. See the following table. The function is disabled by default
when the system is shipped. The user must enable this function using the Adept ACE software
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 77 of 128