5 connecting digital i/o to the system – Adept s600 Cobra User Manual
Page 41
Chapter 4: System Operation
power is a two-step process. An “Enable Power” request must be sent from the user-
supplied PC, an executing program, or the Adept pendant. Once this request has been
made and the High Power On/Off lamp/button is blinking, the operator must press and
release this button, and high power will be enabled.
NOTE: The use of the blinking High Power button can be configured (or
eliminated) in software. Your system may not require this step.
NOTE: If enabled, the Front Panel button must be pressed while blinking
(default time-out is 10 seconds). If the button stops blinking, you must enable
power again.
5. Emergency Stop Switch
The E-Stop is a dual-channel, passive E-Stop that supports Category 3 CE safety
requirements. Pressing this button turns off high power to the robot motors.
NOTE: The Front Panel must be installed to be able to Enable Power to the robot. To
operate without a Front Panel, the user must supply the equivalent circuits.
4.5 Connecting Digital I/O to the System
You can connect digital I/O to the system in several different ways. See the following table and
figure.
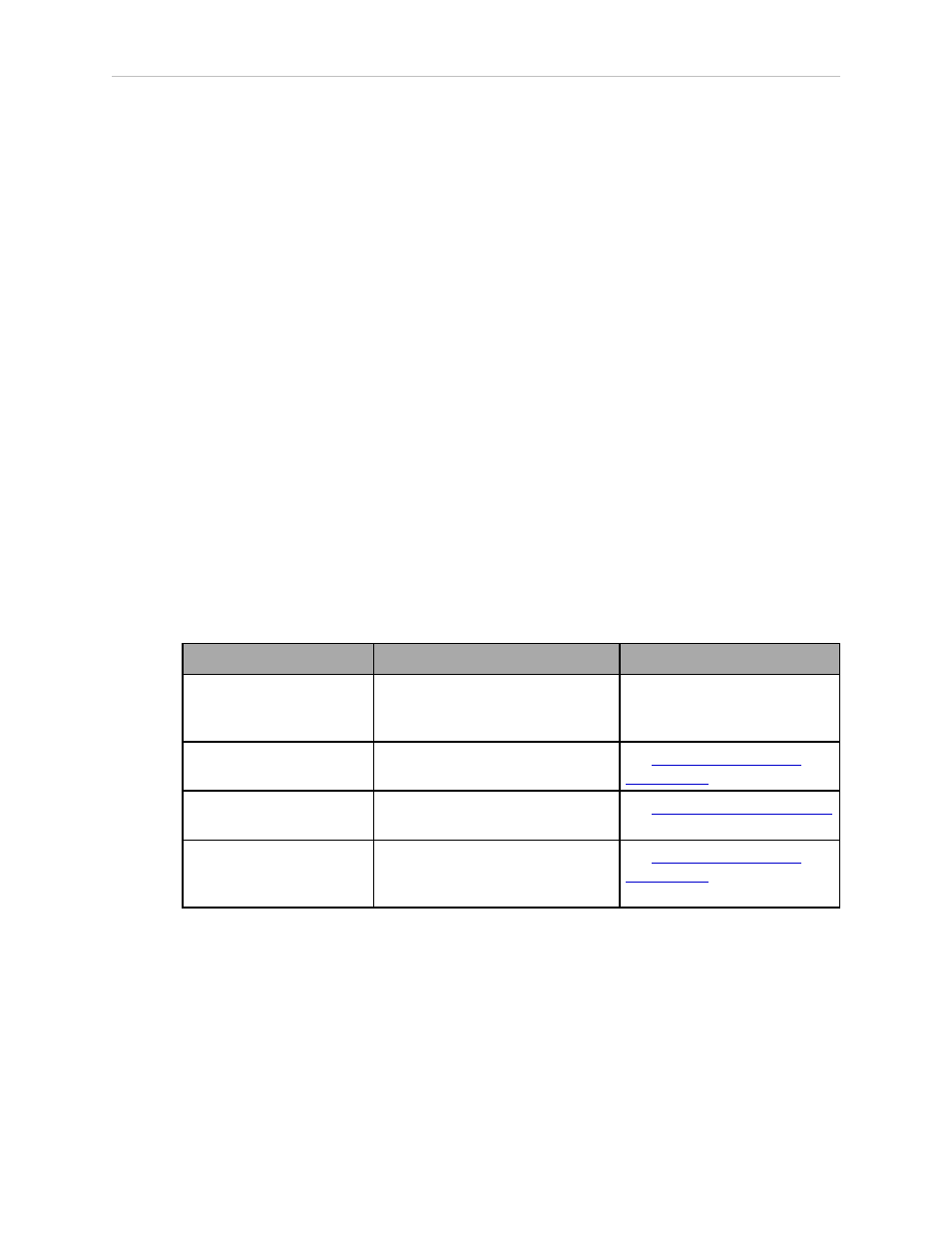
Table 4-3. Digital I/O Connection Options
Product
I/O Capacity
For more details
XIO Connector on Robot
12 inputs
8 outputs
see Using Digital I/O on
Robot XIO Connector on page
43
XDIO Connector on
SmartController
12 inputs
8 outputs
see
Adept SmartController
User's Guide
Optional IO Blox Device,
connects to robot
8 inputs, 8 outputs per device; up
to four IO Blox devices per robot
see
Adept IO Blox User’s Guide
Optional sDIO Module,
connects to controller
32 inputs, 32 outputs per
module; up to eight sDIO per
system
see
Adept SmartController
User's Guide
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 41 of 128