Adept robot safety guide, 6 intended use of the robots, 7 installation overview – Adept s600 Cobra User Manual
Page 14
Chapter 1: Introduction
Adept Robot Safety Guide
The
Adept Robot Safety Guide
provides detailed information on safety for Adept robots. It also
gives resources for more information on relevant standards.
It ships with each robot manual, and is also available from the Adept Document Library. For
details, see Adept Document Library on page 16.
1.6 Intended Use of the Robots
The Adept Cobra s600 and s800 robots are intended for use in parts assembly and material
handling for payloads less than 5.5 kg (12.1 lb). See Robot Specifications on page 108 for
complete information on the robot specifications. Refer to the
Adept Robot Safety Guide
for
details on the intended use of Adept robots.
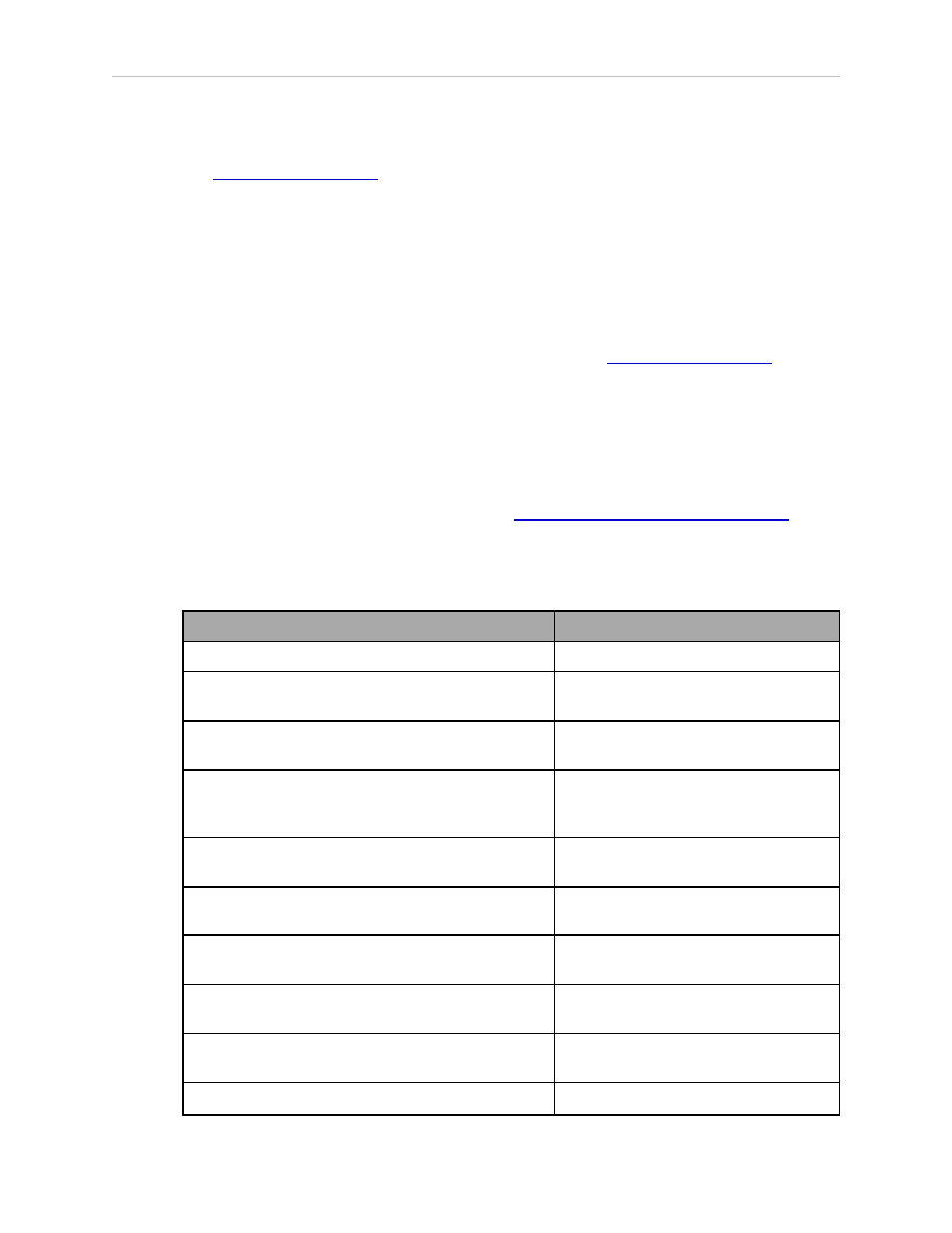
1.7 Installation Overview
The system installation process is summarized in the following table. Also, refer to Robot
Installation on page 17 and System Installation on page 25.
NOTE: For dual-robot installations, see the
Adept Dual-Robot Configuration Procedure
,
which is available in the Adept Document Library.
Table 1-1. Installation Overview
Task to be Performed
Reference Location
Mount the robot on a flat, secure mounting surface.
See Mounting the Robot on page 19.
Install the SmartController, Front Panel, pendant,
and Adept ACE™ software.
See Installing the SmartController on
page 26.
Install the IEEE 1394 and XSYS cables between the
robot and SmartController.
See Cable Connections from Robot to
SmartController on page 27.
Create a 24 VDC cable and connect it between the
SmartController and the user-supplied 24 VDC
power supply.
See Installing the SmartController on
page 26.
Create a 24 VDC cable and connect it between the
robot and the user-supplied 24 VDC power supply.
See Connecting 24 VDC Power to
Robot on page 28.
Create a 200-240 VAC cable and connect it between
the robot and the facility AC power source.
See Connecting 200-240 VAC Power to
Robot on page 31.
Install user-supplied safety barriers in the workcell.
See Installing User-Supplied Safety
Equipment on page 36.
Learn about connecting digital I/O through the XIO
connector on the robot.
See Using Digital I/O on Robot XIO
Connector on page 43.
Learn about starting the system for the first time.
See Starting the System for the First
Time on page 50.
Learn about installing optional equipment,
See Installing End-Effectors on page 71.
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 14 of 128