Adept s600 Cobra User Manual
Page 22
Chapter 2: Robot Installation
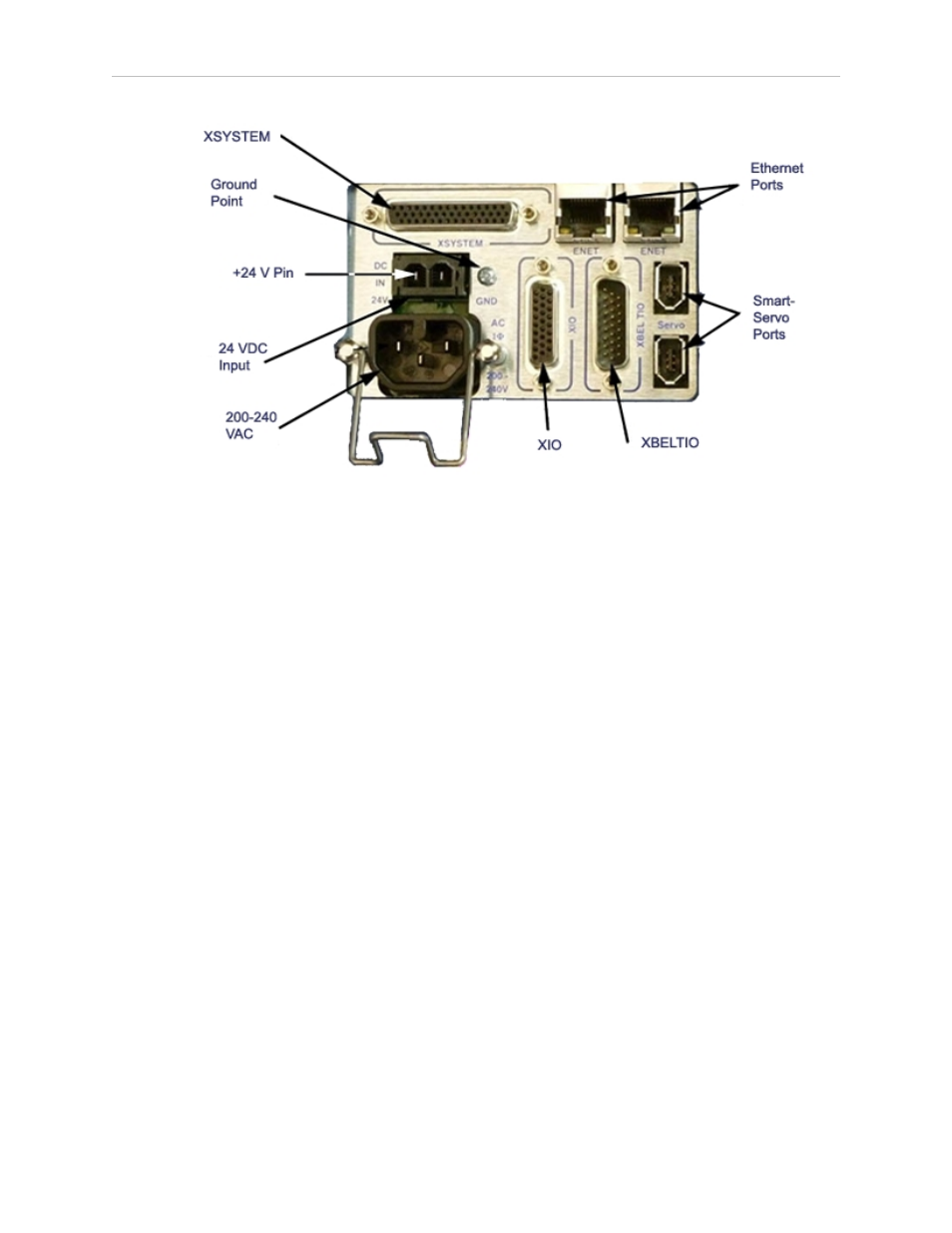
Figure 2-3. Robot Interface Panels - AIB and eAIB
The following connections are the same for both the AIB and the eAIB:
24 VDC—for connecting user-supplied 24 VDC power to the robot. The mating connector is
provided.
Ground Point—for connecting cable shield from user-supplied 24 VDC cable.
200/240 VAC—for connecting 200-240 VAC, single-phase, input power to the robot. The
mating connector is provided.
SmartServo x2 (IEEE 1394) — for connecting the IEEE 1394 cable from the controller
(SmartServo 1.1) to the robot. The other robot connector can be used to connect to a second
robot or another 1394-based motion axis.
XIO (DB26, high density, female) — for user I/O signals for peripheral devices. This connector
provides 8 outputs and 12 inputs. For connector pin allocations for inputs and outputs, see
Using Digital I/O on Robot XIO Connector on page 43. That section also contains signal
nubmer to access these I/O signals via V+/eV+.
The following connections are different on the AIB and the eAIB:
XSYSTEM (eAIB only) — includes the functions of the XPANEL and XSLV on the AIB. This
requires either the eAIB XSLV Adapter cable, to connect to the XSYS cable, or an eAIB XSYS
cable, which replaces the XSYS cable. See Cable Connections from Robot to SmartController on
page 27.
XPANEL (DB26, high density, male; AIB only) — used only with Cobra i-series robots, for
connecting the front panel and MCP circuit.
XSLV (DB-9, female; AIB only) — for connecting the supplied XSYS cable from the controller
XSYS connector.
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 22 of 128