4 xslv connector, 5 robot specifications – Adept s600 Cobra User Manual
Page 108
Chapter 7: Technical Specifications
XSYS
Pin #
XSYSTEM
Pin #
Description
Comment
Pin Location
8
N/C
9
16
ESTOP_SRC
E-Stop System +24 V
Shell
Shell
SHIELD
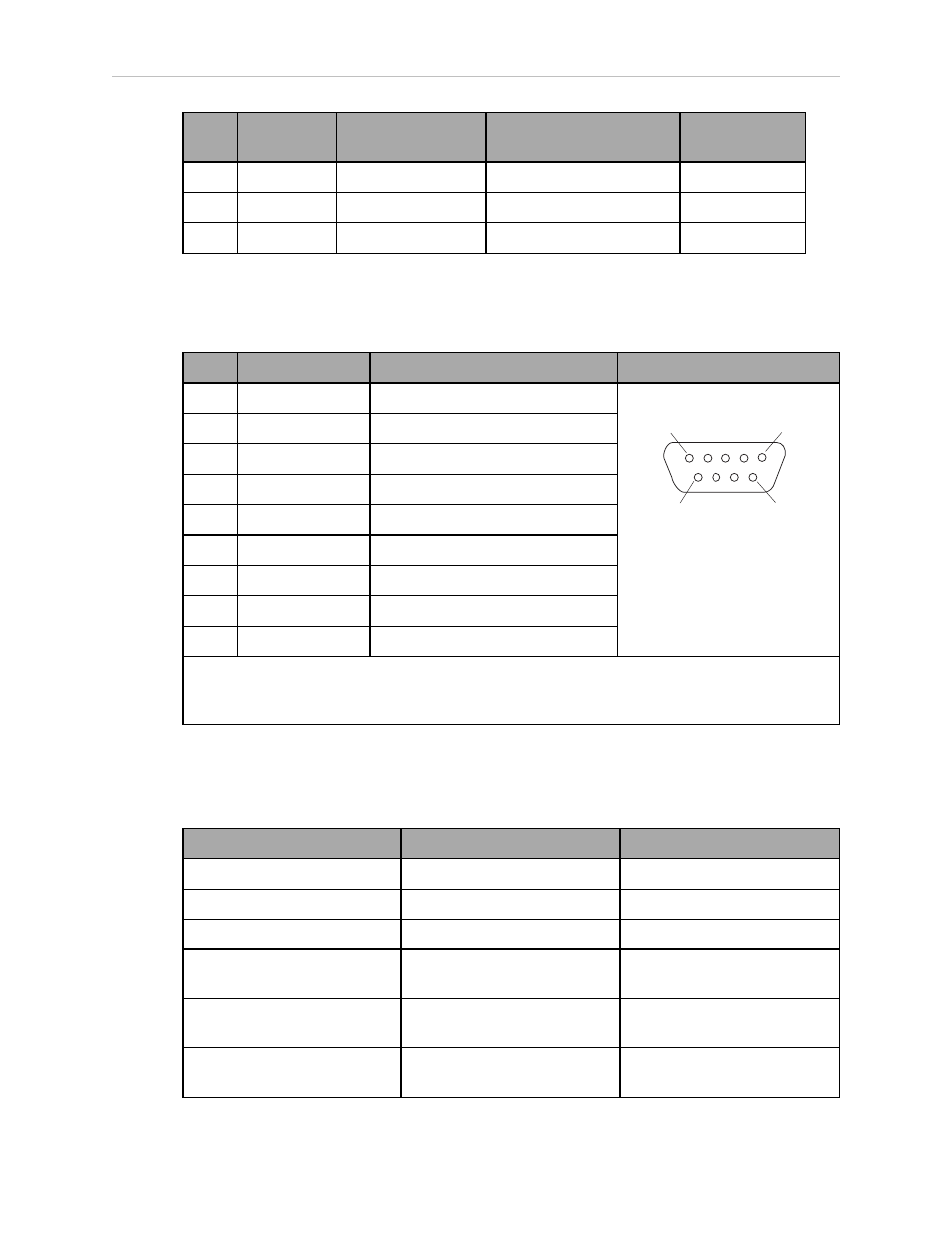
7.4 XSLV Connector
Table 7-2. XSLV Connector Pinout (AIB only)
Pin # Description
Comment
Pin Location
1
ESTOPGND
ESTOP System Ground
Pin 1
Pin 5
Pin 6
Pin 9
XSLV1/2 Connector
as viewed on Cobra
2
MAN1
ESTOP Manual Input Ch 1
3
MAN2
ESTOP Manual Input Ch 2
4
HIPWRDIS
High Power Disable
5
ESTOP_RESET
Normally Closed Check Contacts
6
AUTO1
ESTOP Auto Input Ch 1
7
AUTO2
ESTOP Auto Input Ch 2
8
N/C
9
ESTOP_SRC
ESTOP System +24 V
Mating Connector:
AMP/Tyco #747904-2, 9-pin D-Sub
AMP/Tyco #748676-1, D-Sub Cable Clamp
7.5 Robot Specifications
Table 7-3. Adept Cobra s600/s800 Robot Specifications
a
Description
s600 Robot
s800 Robot
Reach
600 mm (23.6 in)
800 mm (31.5 in)
Payload—rated
2.0 kg (4.4 lb)
2.0 kg (4.4 lb)
Payload—maximum
5.5 kg (12.1 lb)
5.5 kg (12.1 lb)
Moment of Inertia
Joint 4 - 450 kg-cm²
(150 lb-in²) - max
Joint 4 - 450 kg-cm²
(150 lb-in²) - max
Downward Push Force—
Burst, (no load)
343 N (77 lb) - maximum
298 N (67 lb) - maximum
Lateral/Side Push Force—
Burst
178 N (40 lb) - maximum
133 N (30 lb) - maximum
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 108 of 128