Adept s600 Cobra User Manual
Page 47
Chapter 4: System Operation
driver draws power from the primary 24 VDC input to the robot through a self-resetting
polyfuse.
The outputs are accessed through direct connection to the XIO connector (see Table 4-5).
Optionally, use the XIO Termination Block. See the documentation supplied with the
termination block for details.
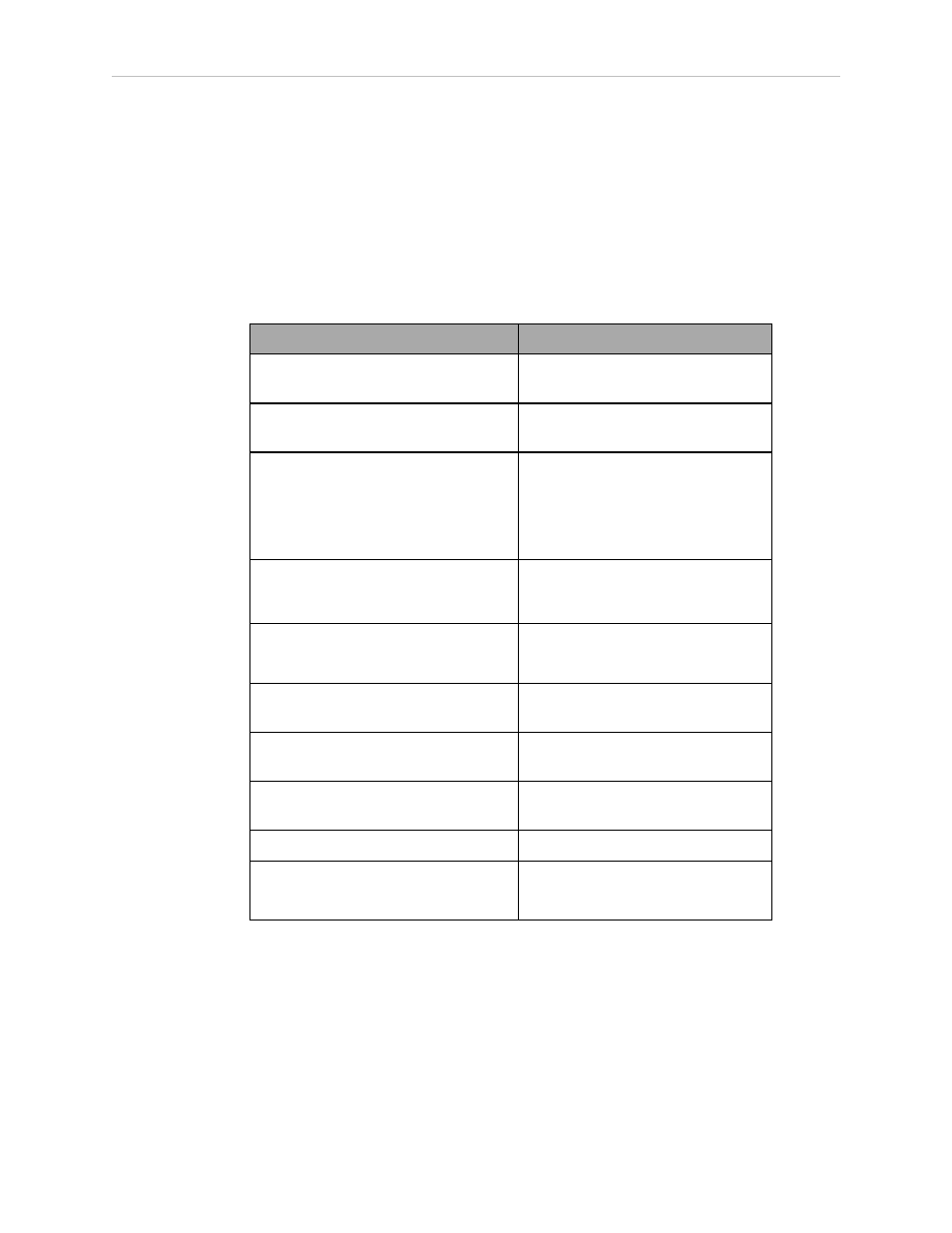
XIO Output Specifications
Table 4-7. XIO Output Circuit Specifications
Parameter
Value
Power supply voltage range
See Specifications for 24 VDC
Power on page 28.
Operational current range, per
channel
I
out
≤
700 mA
Total Current Limitation, all
channels on.
I
total
≤
1.0 A @ 50° C ambient
I
total
≤
1.5 A @ 25° C ambient
On state resistance (I
out
= 0.5 A)
R
on
≤
0.32
Ω
@ 85
°
C
Output leakage current
I
out
≤
25 µA
Turn on response time
125 µsec max., 80 µsec typical
(hardware only)
Turn off response time
60 µsec. max., 28 µsec typical
(hardware only)
Output voltage at inductive load
turnoff (I
out
= 0.5A, Load = 1 mH)
(+V - 65)
≤
V
demag
≤
(+V - 45)
DC short circuit current limit
0.7A
≤
I
LIM
≤
2.5 A
Peak short circuit current
I
ovpk
≤
4 A
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 47 of 128