Robot mounting procedure – Adept s600 Cobra User Manual
Page 20
Chapter 2: Robot Installation
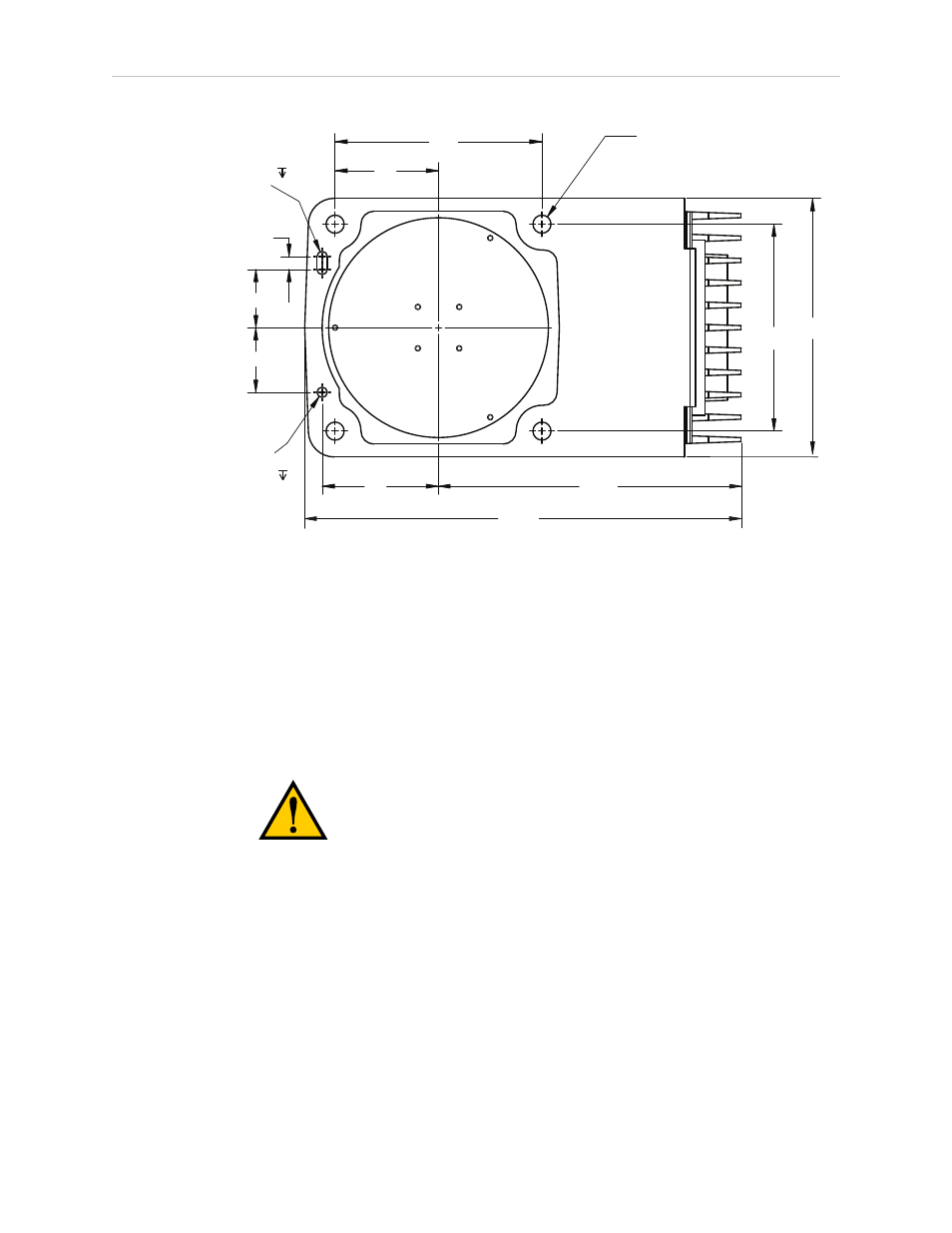
+0.015
6
2x R4
0
45
50
10
160
160
200
80
90
+0.015
0
Ø 8
4X Ø 14 THRU
6
234
338
Units in mm
Figure 2-2. Mounting Hole Pattern for Robot
Robot Mounting Procedure
1. Using the dimensions shown in the previous figure, drill and tap the mounting surface
for four M12 - 1.75 x 36 mm (or 7/16 - 14 UNC x 1.50 in.) machine bolts (bolts are user-
supplied).
2. While the robot is still bolted to the transportation pallet, connect the hydraulic lift to
the eyebolt at the top of the inner link (see Figure 2-1). Take up any slack, but do not lift
the robot at this time.
WARNING: Do not attempt to lift the robot at any points
other than the eyebolt provided. Do not attempt to extend
the inner or outer links of the robot until the robot has
been secured in position. Failure to comply could result
in the robot falling and causing either personnel injury or
equipment damage.
3. Remove the four bolts securing the robot base to the pallet.
Retain these bolts for possible later relocation of the equipment.
4. Lift the robot and position it directly over the mounting surface.
5. Slowly lower the robot while aligning the base and the tapped mounting holes in the
mounting surface.
Adept Cobra s600/s800 Robot, User’s Guide, Rev L1
Page 20 of 128