Slave, safe stop mode, Slave, safe stop parameter list – Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 91
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
91
Slave Modes for Multi-axis Cascaded Systems
Chapter 8
Slave, Safe Stop Mode
When properly configured for Slave, Safe Stop mode, the drive performs the same
functions as Safe Stop except that the drive regards the Door Monitor input as a
Door Control output from an upstream axis, and performs a logical AND with
its internal Door Control signal to form the cascaded Door Control output. This
makes sure that the Door Control output commands the door to unlock only if
all units command the door to unlock.
Slave, Safe Stop Parameter
List
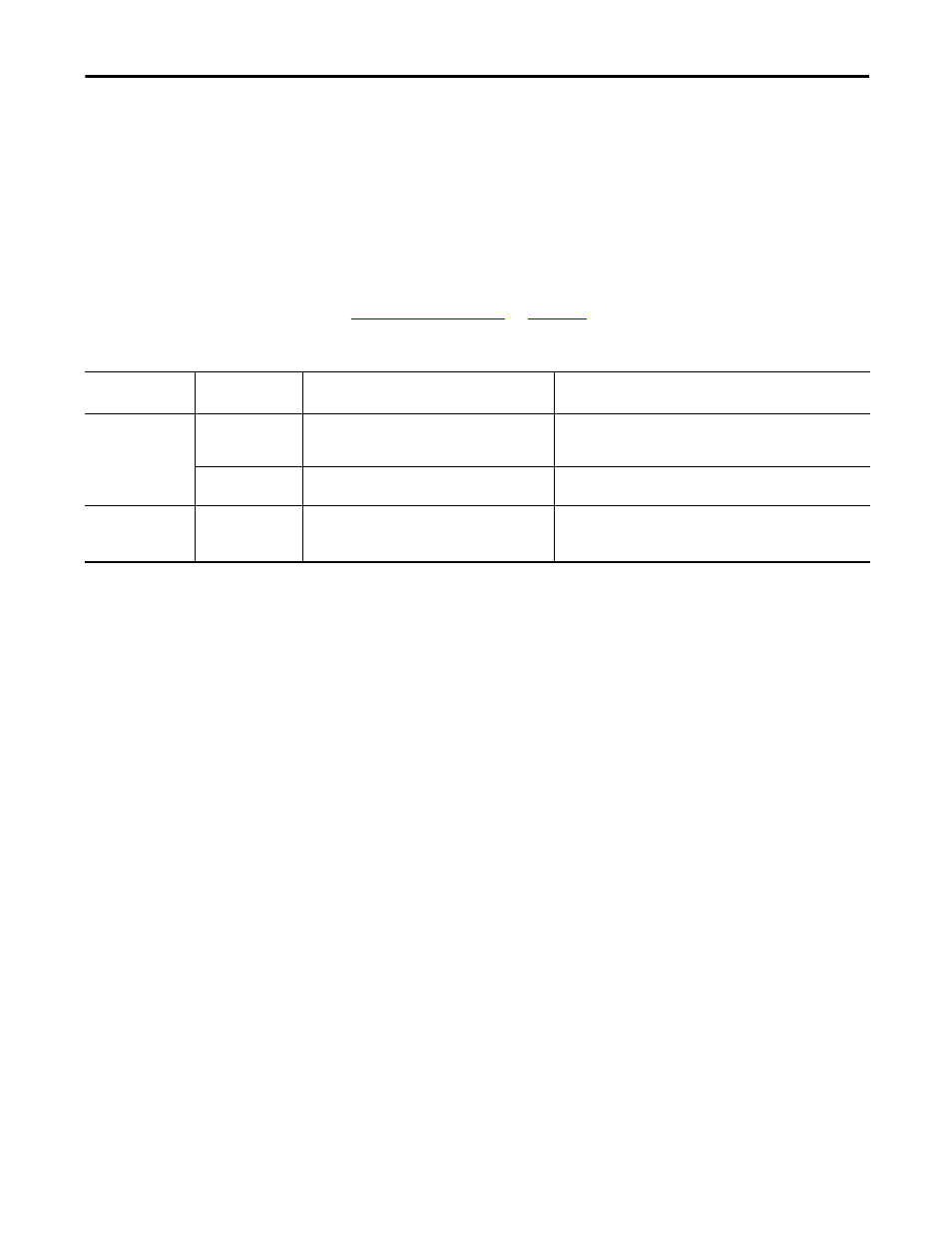
To configure the drive for a Slave, Safe Stop mode, set these parameters. See
for details on configuring slave drives.
Table 27 - Slave, Safe Stop Parameters
Tab
Parameter Name
Description
Values
(Safety Configuration Tool)
Safety
Change System
Configuration
System Configuration
Defines whether the drive is a single unit or if it occupies
a first, middle, or last position in a multi-axis cascaded
system.
Options:
Cascaded Middle Unit
Cascaded Last Unit
Operation Mode
Defines the primary operating mode of the speed
monitoring safety functions.
Default:
SafeStop
Input
Change Input
Configuration Type
Safe Stop
Configuration for Safe Stop input (SS_In).
Option:
Solid State Device Equivalent 3 s