Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 47
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
47
General Device and Feedback Monitoring Configuration
Chapter 5
If your encoder resolution is not listed in the tables, use these equations.
For rotary systems, the conversion from [Overspeed Response Time] to Speed
Resolution in revolutions per minute is:
For linear systems, the conversion from [Overspeed Response Time] to mm/s is:
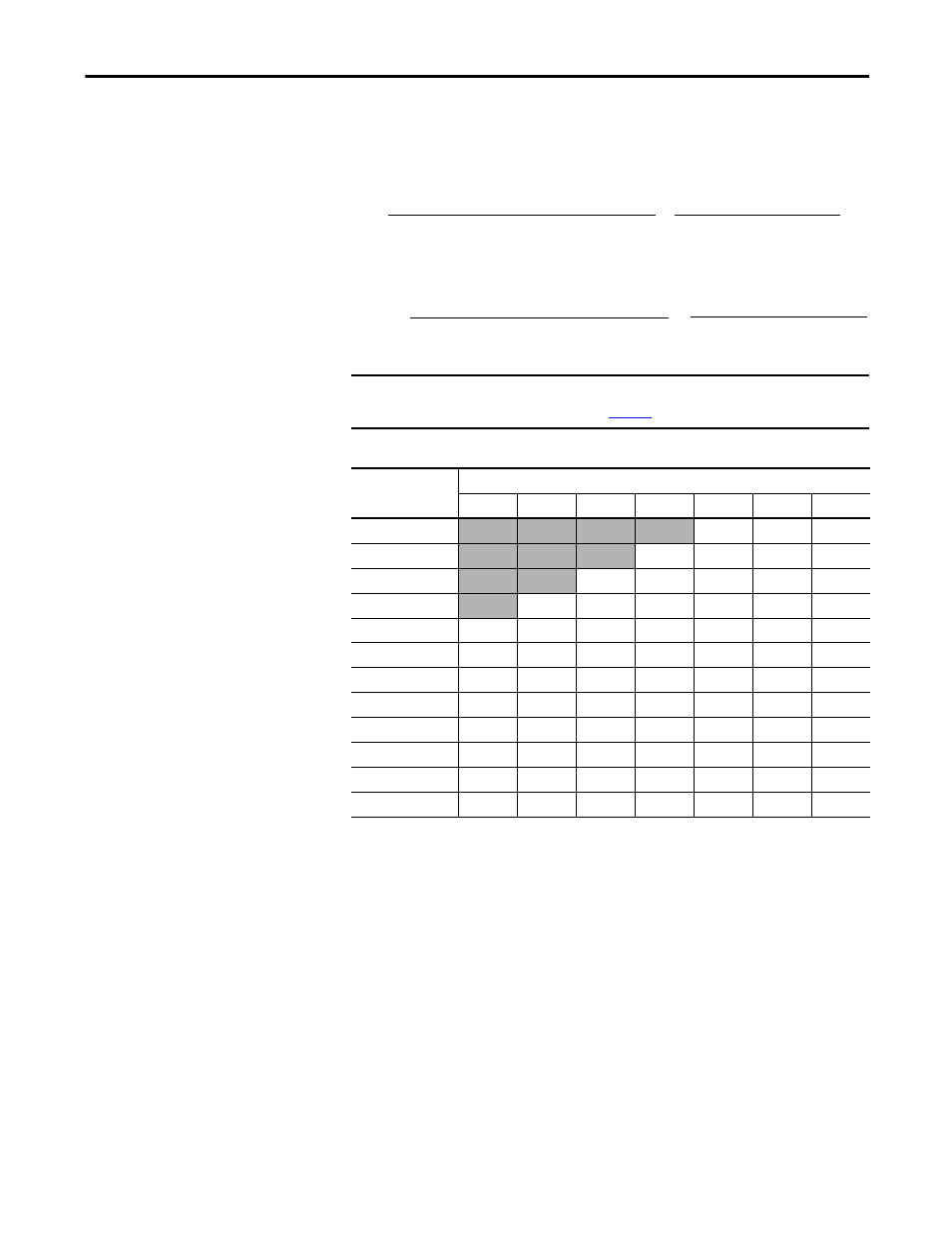
Table 15 - Allowable Overspeed Response/Encoder Resolution Setting
Speed Resolution =
(RPM)
15000
(Overspeed Response Time - 36) x Feedback Resolution
+
Speed (RPM) x 0.02
(Overspeed Response Time - 36)
Speed Resolution =
(mm/s)
250
(Overspeed Response Time - 36) x Feedback Resolution
+
Speed (RPM) x 0.02
(Overspeed Response Time - 36)
IMPORTANT
To avoid nuisance FEEDBACK 1 faults, do not configure Overspeed Response
Time in the shaded area of
.
Encoder Resolution
Lines/Rev
Overspeed Response Time (ms)
42
48
60
84
132
228
420
16
156.250
78.125
39.063
19.531
9.766
4.883
2.441
32
78.125
39.063
19.531
9.766
4.883
2.441
1.221
64
39.063
19.531
9.766
4.883
2.441
1.221
0.610
128
19.531
9.766
4.883
2.441
1.221
0.610
0.305
256
9.766
4.883
2.441
1.221
0.610
0.305
0.153
512
4.883
2.441
1.221
0.610
0.305
0.153
0.076
1024
2.441
1.221
0.610
0.305
0.153
0.076
0.038
2048
1.221
0.610
0.305
0.153
0.076
0.038
0.019
4096
0.610
0.305
0.153
0.076
0.038
0.019
0.010
8192
0.305
0.153
0.076
0.038
0.019
0.010
0.005
16,384
0.153
0.076
0.038
0.019
0.010
0.005
0.002
32,768
0.076
0.038
0.019
0.010
0.005
0.002
0.001