Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 107
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
107
Safe Maximum Speed and Direction Monitoring
Chapter 9
You define the Stop Category initiated by the drive in the event of an
Acceleration fault by using the [Safe Maximum Acceleration Monitoring Stop
Behavior] parameter.
Table 30 - SMA Monitoring Stop Behavior
If an Acceleration fault is detected during a Stop Monitoring Delay [Safe Stop
Monitor Delay] and the [Safe Maximum Acceleration Monitoring Stop
Behavior] parameter is configured as Use Safe Torque Off with Check for
Standstill, the Stop Monitoring Delay [Safe Stop Monitor Delay] ends
immediately and Stop Delay [Maximum Stop Time] begins.
If an Acceleration fault is detected during the Stop Delay [Maximum Stop Time],
and the [Safe Maximum Acceleration Monitoring Stop Behavior] parameter
equals Use Configured Stop Type, and feedback signals indicate less than the
maximum frequency
(1)
for your encoder type, then the fault occurs with no
further action. Deceleration Monitoring performs the safety function during the
Stop Delay [Maximum Stop Time]. That is, if an Acceleration fault occurs during
the Stop Delay [Maximum Stop Time], the fault is ignored and the stopping
action continues.
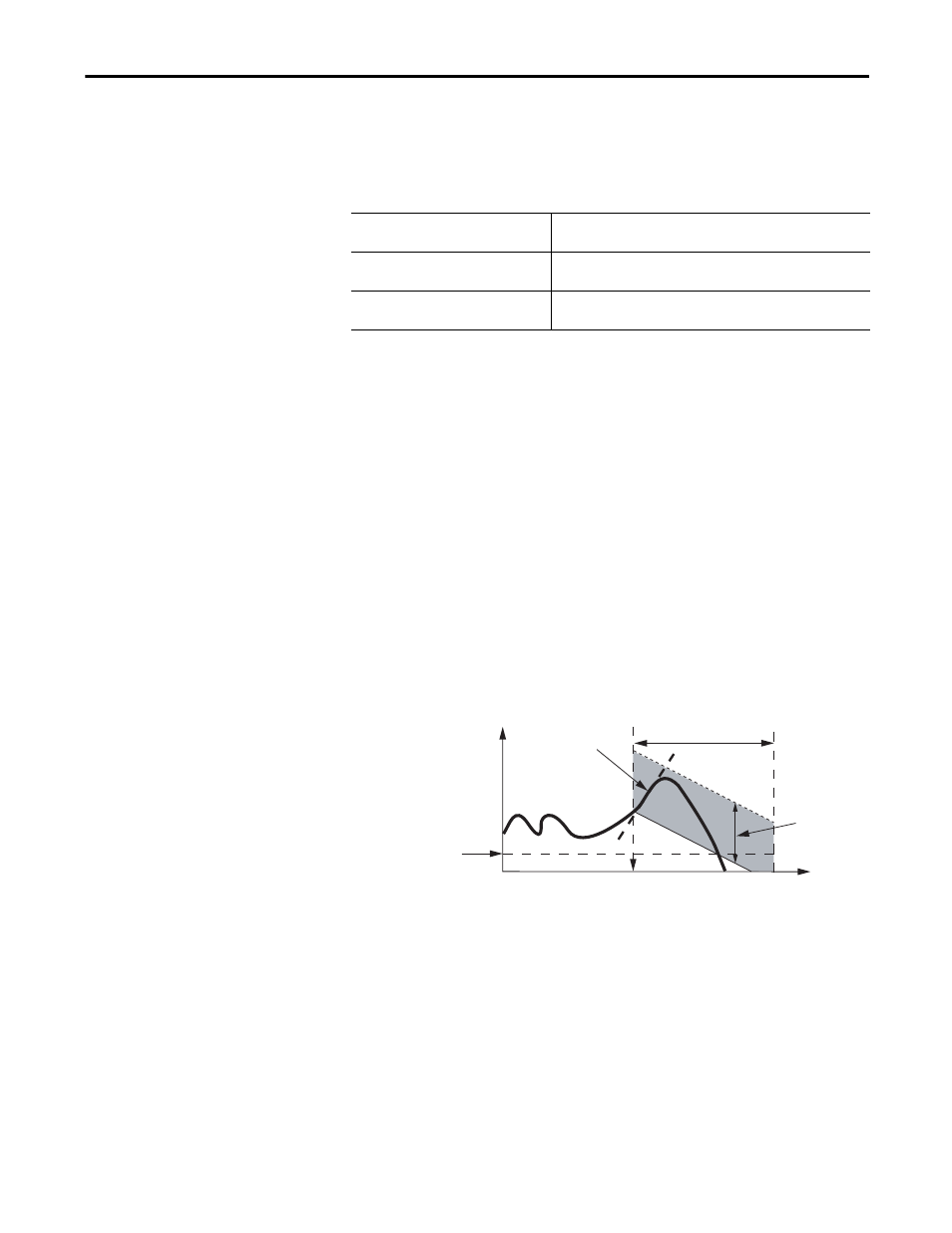
Figure 43 - Acceleration Fault When [Safe Maximum Acceleration Monitoring Stop Behavior] Set
to ‘Use Configured Stop Type’
If an Acceleration fault is detected during the Stop Delay [Maximum Stop Time]
and the [Safe Maximum Acceleration Monitoring Stop Behavior] parameter
equals Use Safe Torque Off with Check for Standstill, the Acceleration fault is
reported and Motion Power is removed. The Stop Delay [Maximum Stop Time]
continues with standstill checking enabled.
[Safe Maximum Acceleration
Monitoring Stop Behavior] Parameter
Description
Use Safe Torque Off with Check for Standstill The drive initiates Safe Torque Off with Check for Standstill any time an
Acceleration fault is detected while the drive is monitoring motion.
Use Configured Stop Type
The drive initiates the configured Stop Category any time an
Acceleration fault is detected while the drive is monitoring motion.
(1) 100 kHz for Sin/Cos or 200 kHz for Incremental
Stop Request
Stop Delay
Acceleration
Fault
Standstill
Speed
Speed
Time
Deceleration
Tolerance