Safe direction monitoring (sdm) – Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 108
108
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
Chapter 9
Safe Maximum Speed and Direction Monitoring
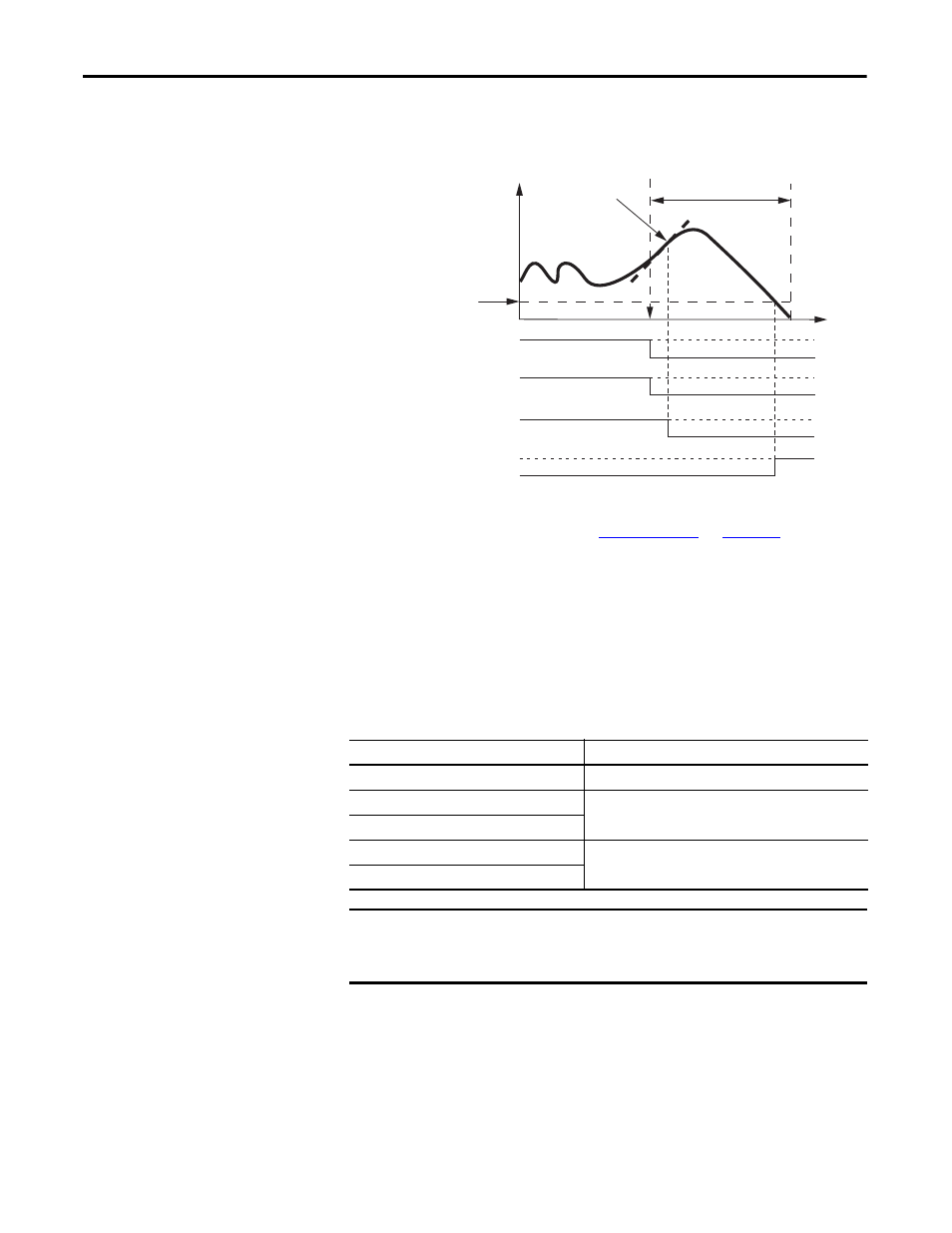
Figure 44 - Acceleration Fault When [Safe Maximum Acceleration Monitoring Stop Behavior] Set
to ‘Use Safe Torque Off with Check for Standstill’
(1) This signal is internal to the drive.
For more information about faults, see
Safe Direction Monitoring
(SDM)
When configured for Safe Direction Monitoring, the drive monitors the
feedback direction and initiates the configured Stop Category when motion in
the illegal direction is detected. You configure Safe Direction Monitoring by
using the [Enable Safe Direction Monitoring] parameter. This parameter also
determines the direction, positive or negative, that motion is allowed.
Table 31 - Enable Safe Direction Monitoring
You can configure a position limit, in encoder units, tolerated in the wrong
direction before a Direction fault occurs, by using the [ Jitter Tolerance]
parameter.
Stop Request
Stop Delay
Acceleration
Fault
Standstill Speed
Speed
Time
Motion Power
(1)
DC_Out
SS_In
SS_Out
[Enable Safe Direction Monitoring] Parameter
Description
Disabled
Safe Direction Monitoring is disabled.
Positive Always
Safe Direction Monitoring is active any time the configuration is
valid and not Disabled.
Negative Always
Positive During SLS
Safe Direction Monitoring is performed only when the drive is
actively monitoring Safe Limited Speed.
Negative During SLS
IMPORTANT
Be sure to set the [Primary Feedback Polarity] and [Secondary Feedback
Polarity] configuration parameters properly for a consistent direction
between encoder 1 and encoder 2.