Dual feedback speed discrepancy tolerance – Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 52
52
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
Chapter 5
General Device and Feedback Monitoring Configuration
This table defines the legal values for each Feedback mode value.
If an illegal value is detected, an Invalid Configuration fault occurs and the drive
remains in the Safe State.
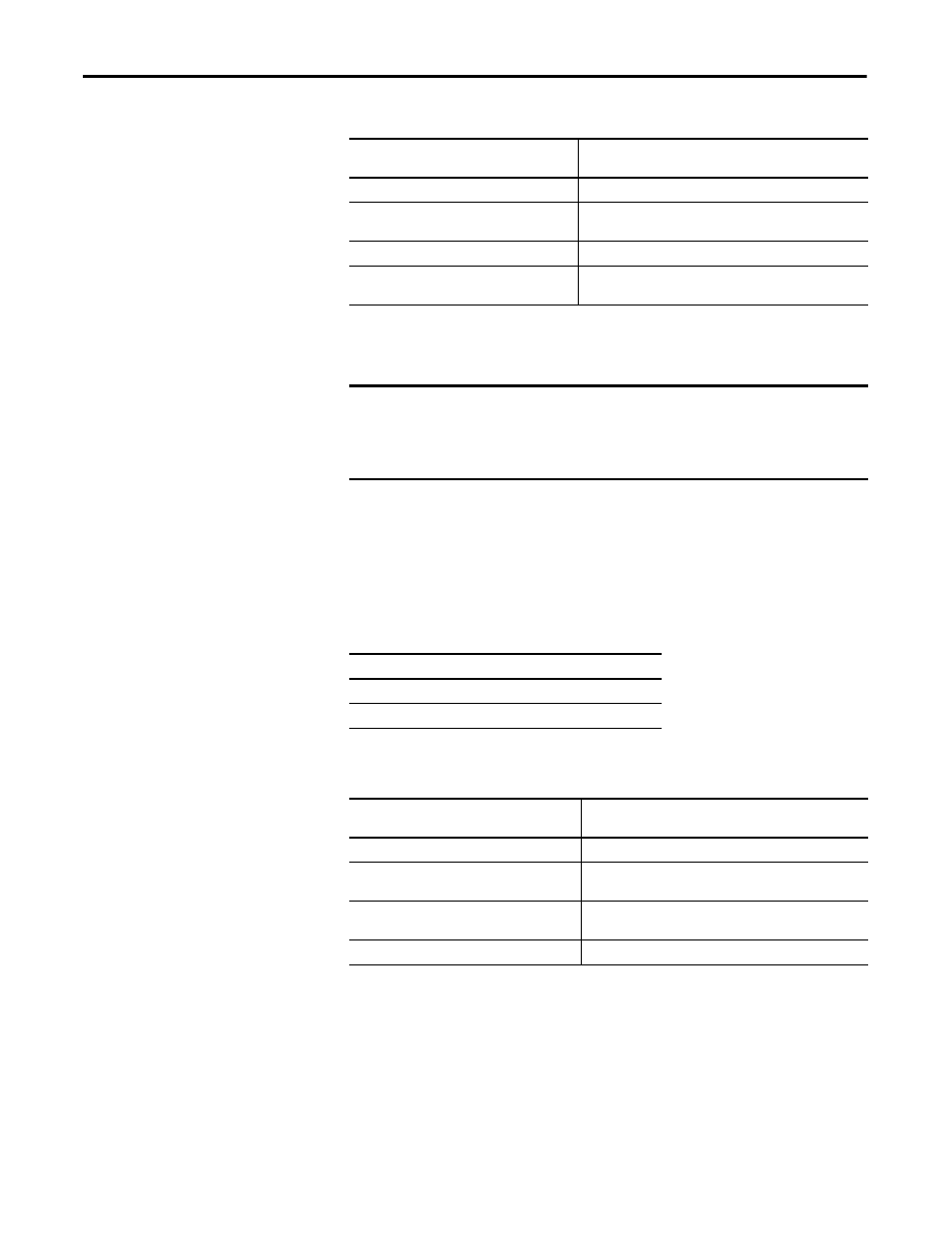
Dual Feedback Speed Discrepancy Tolerance
The Dual Feedback Speed Discrepancy Tolerance [Velocity Discrepancy
Tolerance] parameter, defines the discrepancy that is tolerated for a difference in
speed between encoder 1 and encoder 2. This speed is relative to encoder 1. This
discrepancy checking is performed only while the Feedback mode is equal to one
of these values.
For rotary systems, the value is specified in revolutions per minute. For linear
systems, the value is specified in mm per second.
If an illegal value is detected, an Invalid Configuration fault occurs and the drive
remains in the Safe State.
[Feedback Mode] Parameter Settings
Dual Feedback Position Discrepancy Tolerance, [Position
Discrepancy Tolerance] Legal Values
One encoder
0
Dual encoder with speed and position discrepancy
1…65,535 in degrees (rotary encoders) or mm (linear encoders)
relative to the resolution of encoder 1
Dual encoder with speed discrepancy checking
0
Dual encoder with position discrepancy checking
1…65,535 in degrees (rotary encoders) or mm (linear encoders)
relative to the resolution of encoder 1
IMPORTANT
When setting discrepancy tolerances, consider that configuring a high gear
ratio between encoder 1 and encoder 2 can lead to unexpected dual feedback
position faults. This is because a very large encoder 1 movement translates
into a very small encoder 2 movement.
[Feedback Mode] Parameter Settings
Dual encoder with speed and position discrepancy checking
Dual encoder with speed discrepancy checking
[Feedback Mode] Parameter Settings
Dual Feedback Speed Discrepancy Tolerance, [Velocity
Discrepancy Tolerance] Values
One encoder
0
Dual encoder with speed and position discrepancy
checking
0.1…6553.5 in rev/min (rotary encoders) or mm/s (linear
encoders)
Dual encoder with speed discrepancy checking
0.1…6553.5 in rev/min (rotary encoders) or mm/s (linear
encoders)
Dual encoder with position discrepancy checking
0