Feedback parameter list – Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 54
54
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
Chapter 5
General Device and Feedback Monitoring Configuration
Feedback Parameter List
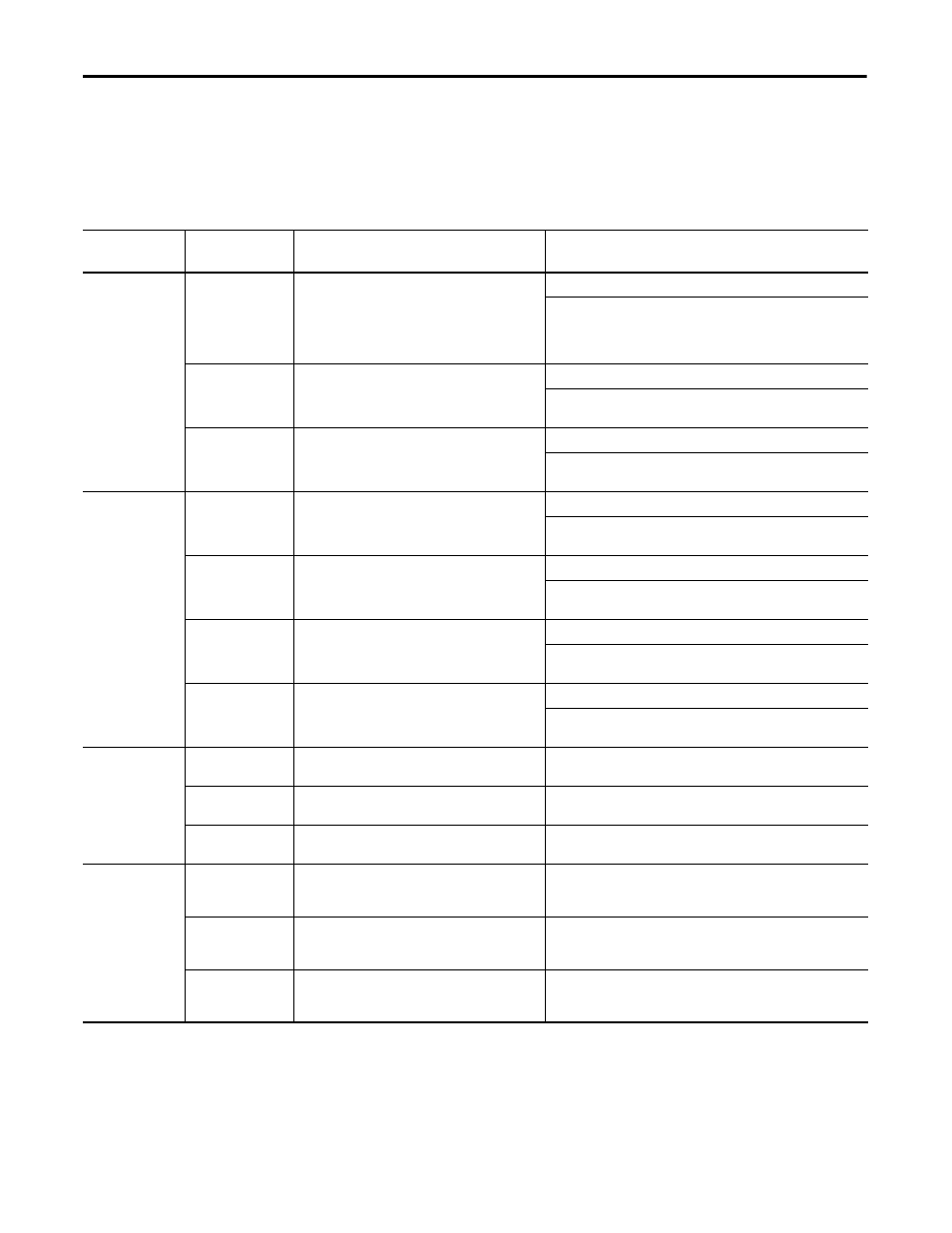
To define the type of feedback used by the drive, set these parameters.
Table 19 - Feedback Parameters
TIP
Secondary feedback parameter settings are not required when the [Feedback
Mode] parameter setting is single encoder.
Tab
Parameter Name
Description
Values
(Safety Configuration Tool)
Feedback
Change Feedback
Configuration
Feedback Mode
Selects the number of feedback devices and the type of
discrepancy checking.
Default:
Single Encoder
Options:
Single Encoder
Dual Encoders w/speed and position discrepancy
Dual Encoders w/speed discrepancy
Dual Encoders w/position discrepancy
5V Monitoring
Enable 5V monitoring.
Default:
Voltage not monitored
Options:
Voltage not monitored
Voltage monitored
9V Monitoring
Enable 9V monitoring.
Default:
Voltage not monitored
Options:
Voltage not monitored
Voltage monitored
Feedback
Primary Feedback
Type
Selects the type of feedback for encoder 1.
Default:
Sin/Cos
Options:
Sin/Cos
TTL (incremental)
Cycles
Defines counts (linear) or revolutions (rotary) for
encoder 1.
Default:
1024
Range:
1…65,535 pulses/revolution or pulses/mm based on the
[Primary Feedback Units] parameter
Units
Selects millimeters or revolutions for encoder 1.
Default:
Revolutions (per Rev)
Options:
Revolutions (per Rev)
Millimeters (per mm)
Feedback Polarity
Defines the direction polarity for encoder 1.
Default:
Positive
Options:
Positive
Negative
Feedback
Secondary Feedback
Cycles
Defines counts (linear) or revolutions (rotary) for
encoder 2.
Range:
1…65,535 pulses/revolution or pulses/mm based on the
[Secondary Feedback Units] parameter
Units
Selects millimeters or revolutions for encoder 2.
Options:
Revolutions (per Rev)
Millimeters (per mm)
Feedback Polarity
Defines the direction polarity for encoder 2.
Options:
Positive
Negative
Feedback
Dual Feedback
Velocity Ratio
Defines the ratio of the expected speed of encoder 2
divided by the expected speed of encoder 1.
Not valid when Feedback Mode = Single Encoder.
Range:
0.0001…10,000.0
ratio based on revolutions or millimeters configuration
defined by the [Primary Feedback Units] parameter
Velocity Discrepancy
Tolerance
Dual Feedback Speed Discrepancy Tolerance.
Range:
0…6553.5 rpm or mm/s
ratio based on revolutions or millimeters configuration
defined by the [Primary Feedback Units] parameter
Position Discrepancy
Tolerance
Acceptable difference in position between encoder 1
and encoder 2.
Range:
0…65,535 deg or mm
ratio based on revolutions or millimeters configuration
defined by the [Primary Feedback Units] parameter