Deceleration monitoring – Rockwell Automation 2094-EN02D-M01-S1 Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual User Manual
Page 62
62
Rockwell Automation Publication 2094-RM001C-EN-P - May 2013
Chapter 6
Safe Stop and Safe Stop with Door Monitoring Modes
The time required to verify that the Standstill Speed has been reached can be
considerable when a very small Standstill Speed is configured and the encoder
resolution of encoder 1 is very low.
• For rotary systems, the time (in seconds) exceeds
15 / [Standstill Speed (RPM) x Encoder 1 Resolution].
• For linear systems, the time (in seconds) exceeds
0.25 / [Standstill Speed (mm/s) x Encoder 1 Resolution].
Deceleration Monitoring
Deceleration monitoring takes place during the configured Stop Delay
[Maximum Stop Time], when the Stop Category is configured as Safe Stop 1 or
Safe Stop 2. The deceleration start speed is captured at the beginning of the Stop
Delay [Maximum Stop Time] and used to calculate the deceleration profile.
These parameters define the deceleration profile:
• Deceleration Reference Speed, [Deceleration Reference Speed]
• Deceleration Tolerance, [Deceleration Tolerance]
• Stop Delay, [Maximum Stop Time]
The Deceleration Reference Speed is relative to encoder 1. The [Deceleration
Tolerance] parameter defines the percentage of the Deceleration Reference Speed
that is tolerated above the calculated deceleration profile.
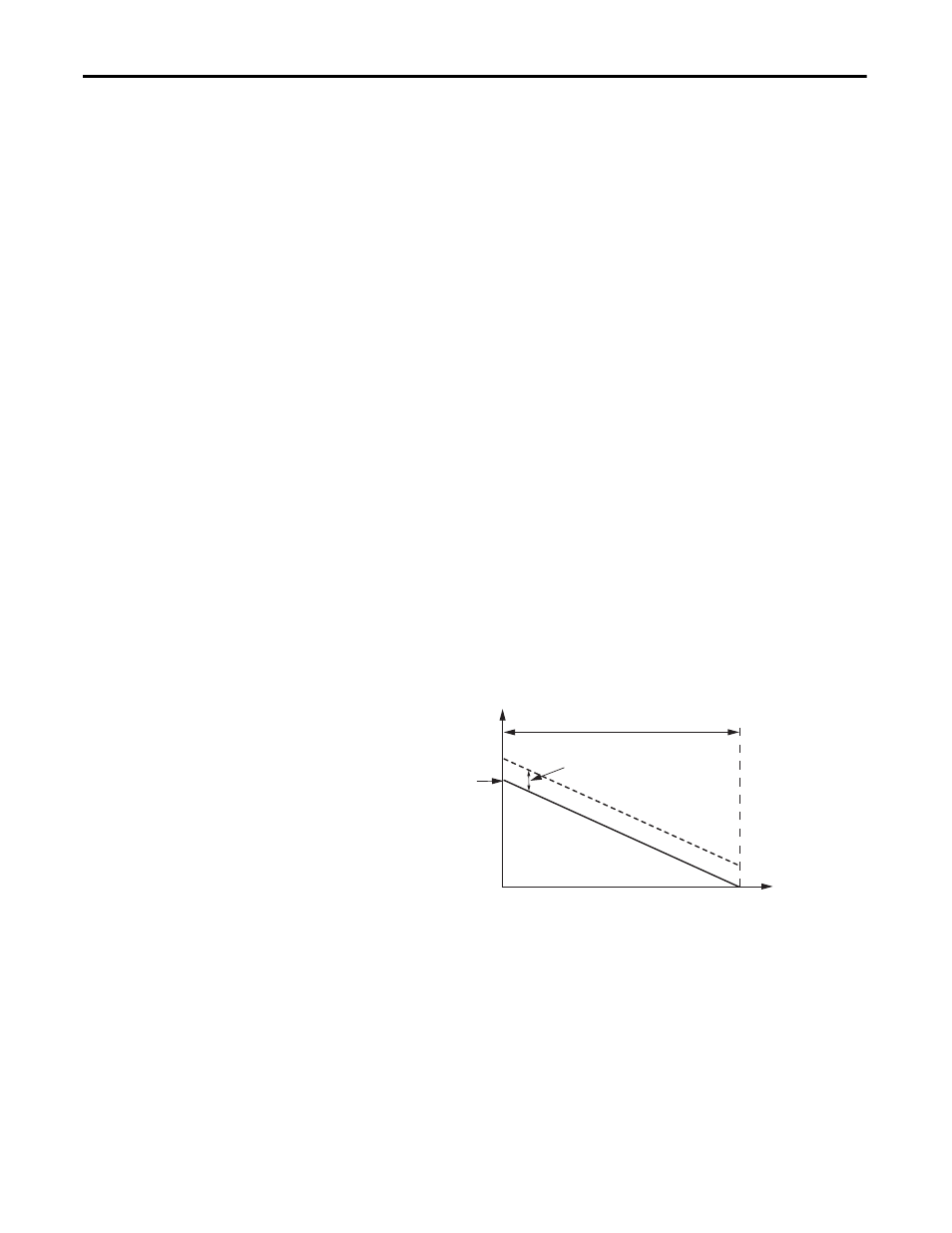
Figure 16 - Deceleration Monitoring
When deceleration monitoring is being performed, the speed limit monitored
during the Stop Delay [Maximum Stop Time] must be less than the Deceleration
Monitoring Value or a Deceleration fault occurs. A Deceleration fault places
outputs in the faulted state, but allows the door to be unlocked when the
feedback signals indicate Standstill Speed has been reached.
Standstill Speed
Time
Stop Delay
(
∆v) = Deceleration Tolerance %
x Deceleration Reference Speed
Actual speed measured at the start of the Stop
Delay [Maximum Stop Time].
Stop Request
Speed
TIP
To account for system overshoot and drive delay, choose
∆v and set
[Deceleration Reference Speed] to the highest normal operating speed to
calculate the Deceleration Tolerance. Remember that [Deceleration
Tolerance] parameter is a percentage.