Plc designer v2.x| lenze application samples – Lenze PLC Designer V2.x User Manual
Page 259
1.3 EN - 07/2012
L
259
PLC Designer V2.x| Lenze Application Samples
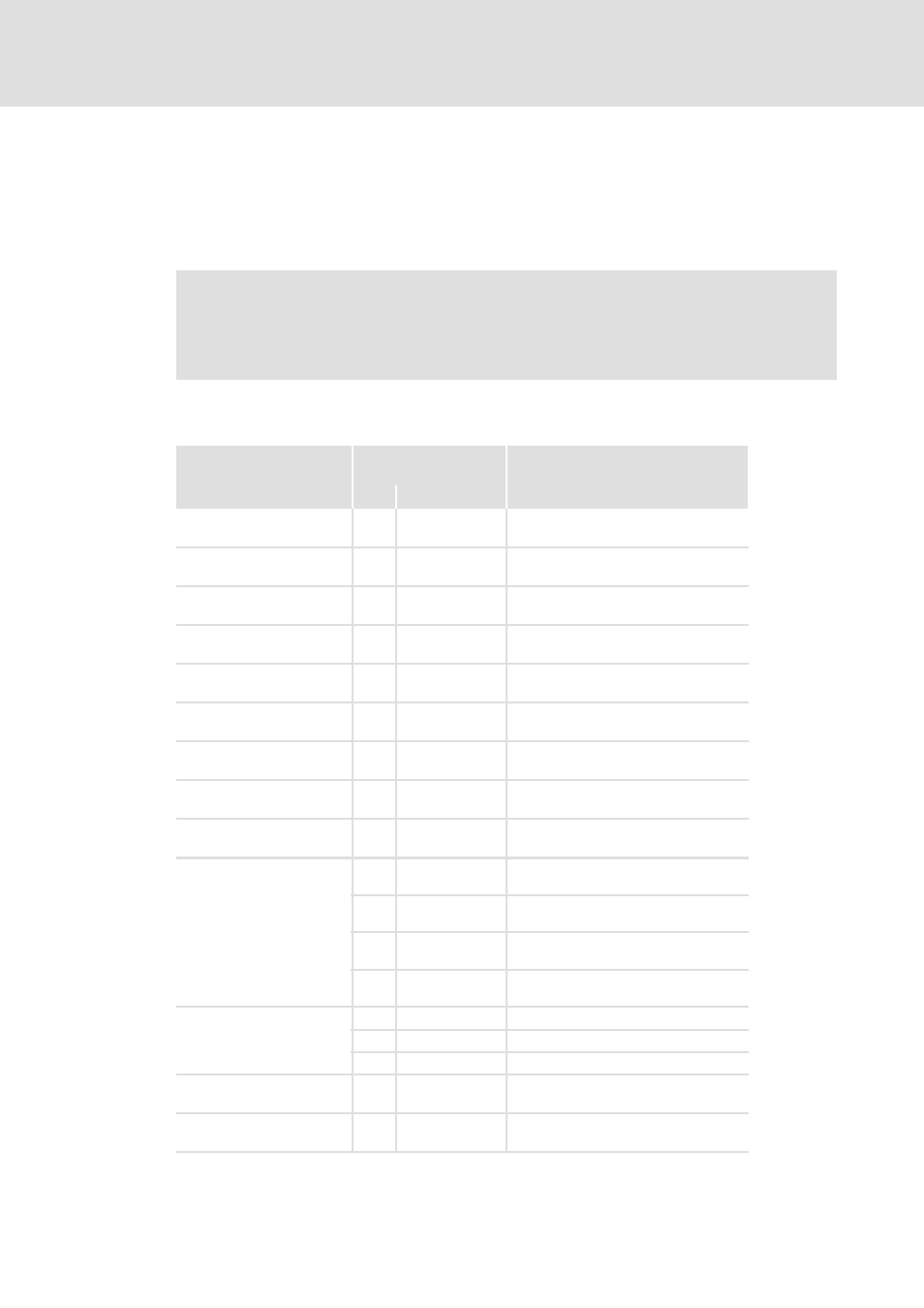
The L_SCS_DriveECS.lib library
L_SCS_PosiShaft - actuation of the ECS servo system
13.3.1
Structure of SCS_DriveControl_PosiShaft - control for the drive
The Lenze sample projects offer you a predefined mapping for the controller, in order to be
able to commission and control it. To what extent the assignments of the FB in the »PLC
Designer« are associated to the control bits in the respective device can be gathered from
the following table overview.
Assignment CanIn1
Further information on the internal interfaces of the controller can be found in
the operating instructions (BA) ECS: Axis module - "Posi & Shaft" application:
• Section Commissioning
Process data to the axis module (control word Ctrl1
and setpoints)
Identifier/data type
Control bits in the
controller
Bit
Identifier
Meaning
xEnable
BOOL
9
Rsp
Controller inhibit (CINH)
xQSP
BOOL
3
Quickstop
(QSP)
Quick stop (QSP)
xErrorSet
BOOL
10
TripSet
Change to "Trouble"
xErrorReset
BOOL
11
TripReset
Reset fault message - change to "Stand-
by"
xManualPos
BOOL
13
JogCW
Manual jog in positive direction (CW
rotation)
xManualNeg
BOOL
12
JogCCW
Manual jog in negative direction (CCW
rotation)
xProfEnable
BOOL
8
ProfEnable
Start positioning profile
xRelLimSwitch
BOOL
14
RelLimSwitch
Activate "Retracting from limit switch"
function.
xPosDirect
BOOL
15
PosDirect
Selection for setpoints in Word 2 ... 4 of
the process input data
byPSNumber
BYTE
4
PNoSet_1
Selection of positioning profile
(binary coded 2
0
)
5
PNoSet_2
Selection of positioning profile
(binary coded 2
1
)
6
PNoSet_4
Selection of positioning profile
(binary coded 2
2
)
7
PNoSet_8
Selection of positioning profile
(binary coded 2
3
)
byFuncNumber
BYTE
0
Func1
Signal selection iPar1/2, binary coded 2
0
1
Func2
Signal selection iPar1/2, binary coded 2
1
2
Func4
Signal selection iPar1/2, binary coded 2
2
rPosDirect
REAL
PosDirect
Pos-setpoint for positioning mode
C3095/x =110 ... 113
rVelDirect
REAL
VelDirect
Vel-setpoint for positioning mode
C3095/x =110 ... 113