Spectra Precision ProMark 800 Reference Manual User Manual
Page 97
85
RTK Implementation
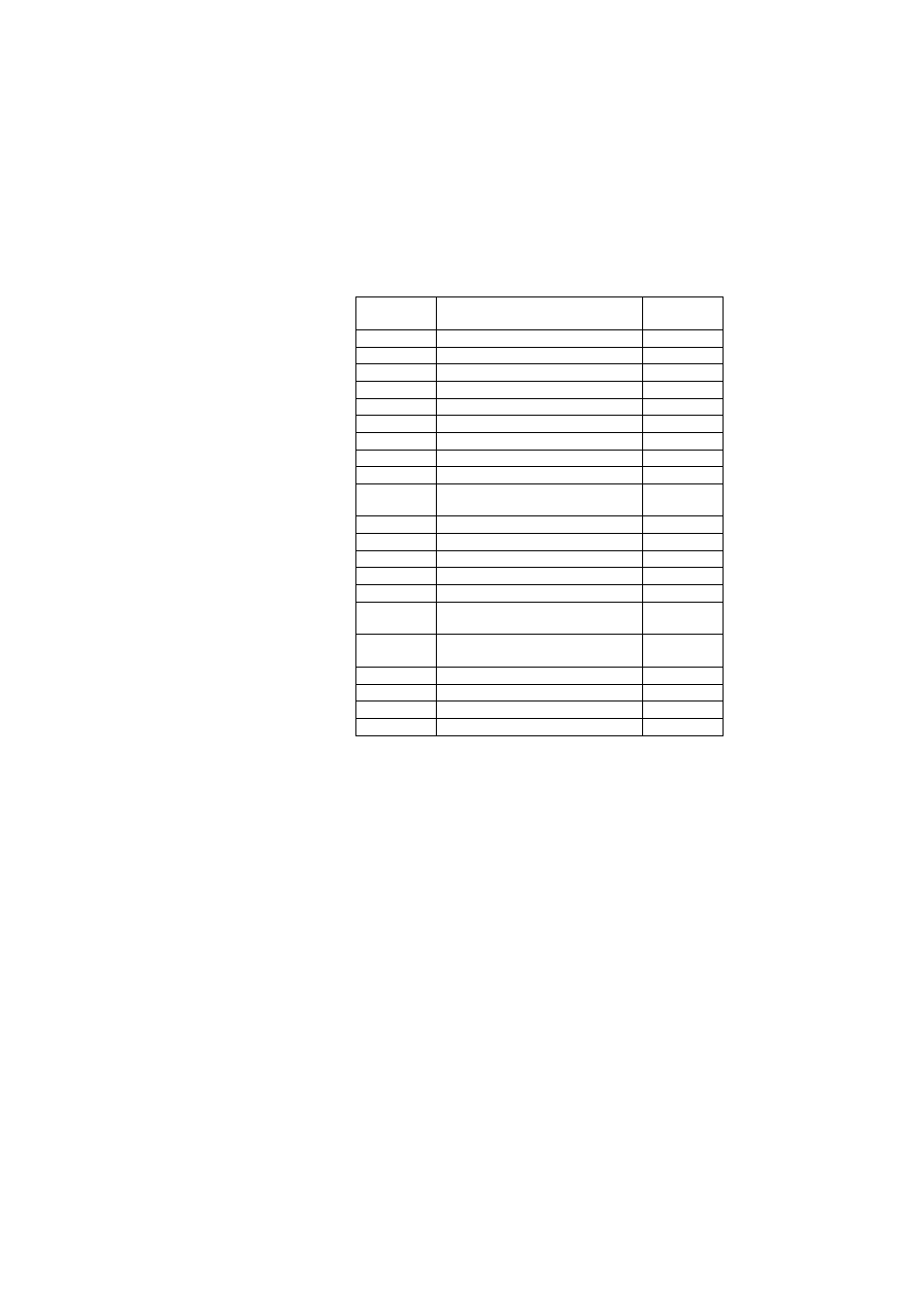
RTCM3.0 and 3.1. The message types that exist in these
versions are numbered from 1001 to 1029. The most
important ones are listed below.
When a rover is given the capability to decode RTCM
messages 1021, 1022, 1023 and 1025, the position it
computes can be expressed directly in the same local
coordinate system as the one used by the base station that
provides it with RTK corrections.
Through these messages, you can be sure the rover will
automatically use the same transformation parameters as the
base to deliver local coordinates. The projected position
solution can be output through NMEA message GMP.
Message Type
Description
Default
Transfer Rate
1001
L1-only GPS RTK observables
1002
Extended L1 only GPS RTK observables
1003
L1 & L2 GPS RTK observables
1004
Extended L1&L2 GPS observables
1 second
1005
Stationary RTK reference station ARP
1006
Base ARP with antenna height
13 seconds
1007
Antenna descriptor
1008
Antenna descriptor and serial number
1009
L1-only GLONASS RTK observables
1010
Extended L1-only GLONASS RTK observ-
ables
1011
L1&L2 GLONASS observables
1012
Extended L1&L2 GLONASS observables
1 second
1013
System parameter
1019
GPS ephemeris data
1020
GLONASS ephemeris data
1021
Helmert / Abridged Molodenski Transforma-
tion Parameters
1022
Molodenski-Badekas Transformation
Parameters
1023
Residuals, Ellipsoidal Grid Representation
1025
Projection parameters
1029
Unicode text string
1033
Receiver and antenna descriptors
31 seconds