Otf and “known point” methods – Spectra Precision ProMark 800 Reference Manual User Manual
Page 64
52
Precise Surveying - Field Applications & Concepts
OTF and “Known Point” Methods
Kinematic OTF. For both post-processing and RTK real-time,
this method does not make initialization faster but is the less
constraining method in the field (although it does not release
you from being careful on the operating conditions).
Kinematic OTF should be used by default when there is no
reference in the working area that can help secure the
initialization.
Static OTF. An initialization method usable in RTK surveying
only. The rover asks you to stay still on an unknown point until
initialization is achieved (i.e. RTK position fixed). The
declared static occupation time helps the rover initialize more
quickly.
Known Point. In RTK surveying, the rover asks you to stay still
on a known point until initialization is achieved (i.e. RTK
position fixed). The declared static occupation time helps the
rover initialize more quickly. This is a statistically faster
initialization method than Static OTF for a given baseline
length in the same reception conditions.
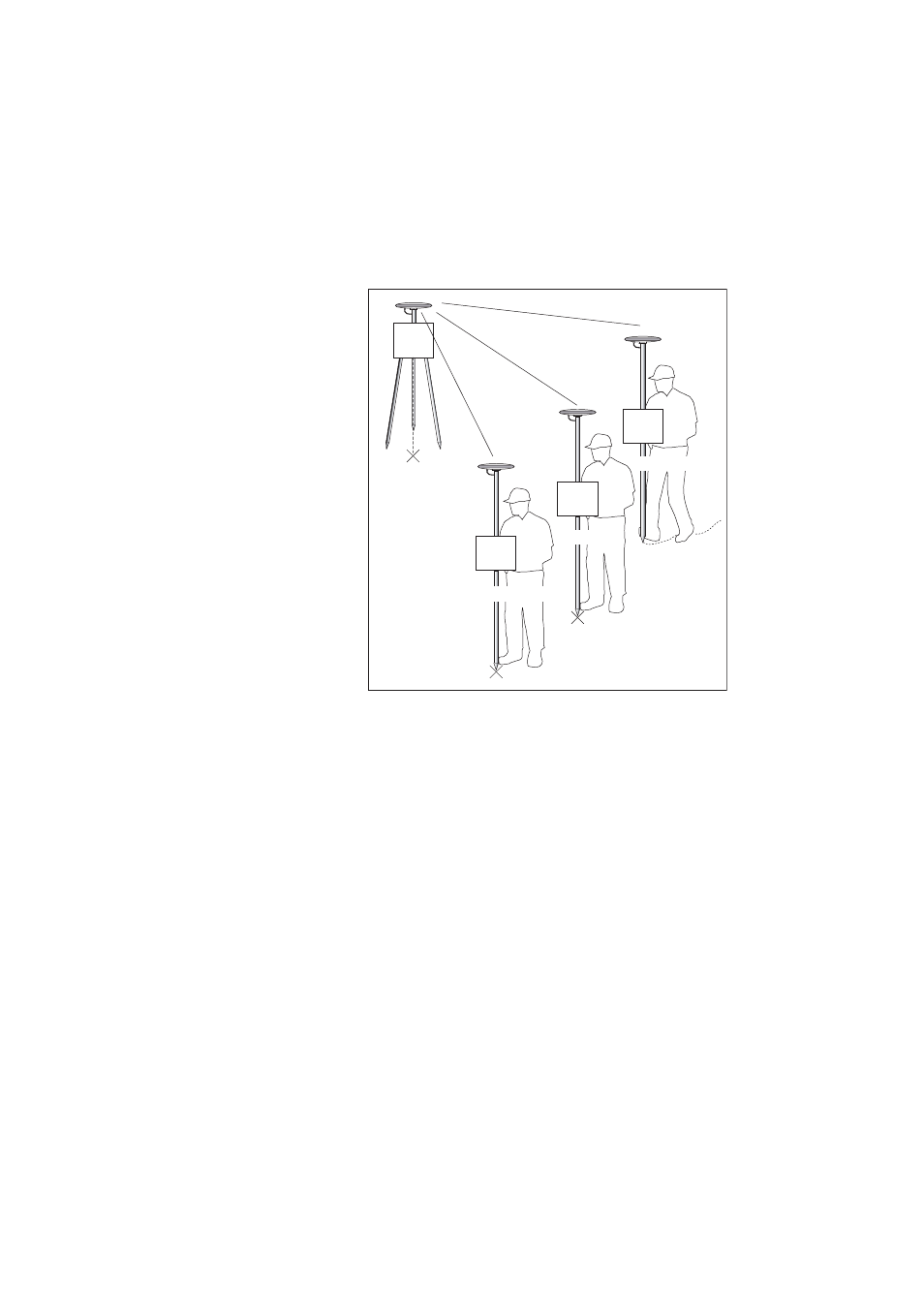
Rover
Baseline
Baseline
Baseline
Reference Point
Base
Rover
Rover
No static occupation
(moving)
Static Occupation on unknown point
Static Occupation on known point
Static OTF
Known Point
Kinematic OTF