When is localization needed, Localization methods – Spectra Precision ProMark 800 Reference Manual User Manual
Page 82
70
Precise Surveying - Field Applications & Concepts
Typically through localization, your equipment determines
the new local grid (a plane) by comparing the known local
coordinates of one or more reference points with the
corresponding geographic coordinates entered or measured
for these points.
NOTICE: Not all the existing field software applications have
the capability to run localization in real time. Spectra
Precision FAST Survey and Survey Pro are two of those
applications that allow you to do that.
When is
Localization
Needed?
Performing localization is required in the following cases:
• Your job requires that a given standard projection be used
but you realize that your equipment does not deliver
exactly the expected coordinates when placed over
existing reference points.
• Your job requires that a local projection be used but none
of the parameters of this projection are known.
• The base is operated on a reference point whose position
was only determined in autonomous GPS mode.
Localization
Methods
Several localization methods exist. The choice of a method
depends on the nature of the problem you have to solve and
the number of available reference points. The most
commonly used localization methods are listed below:
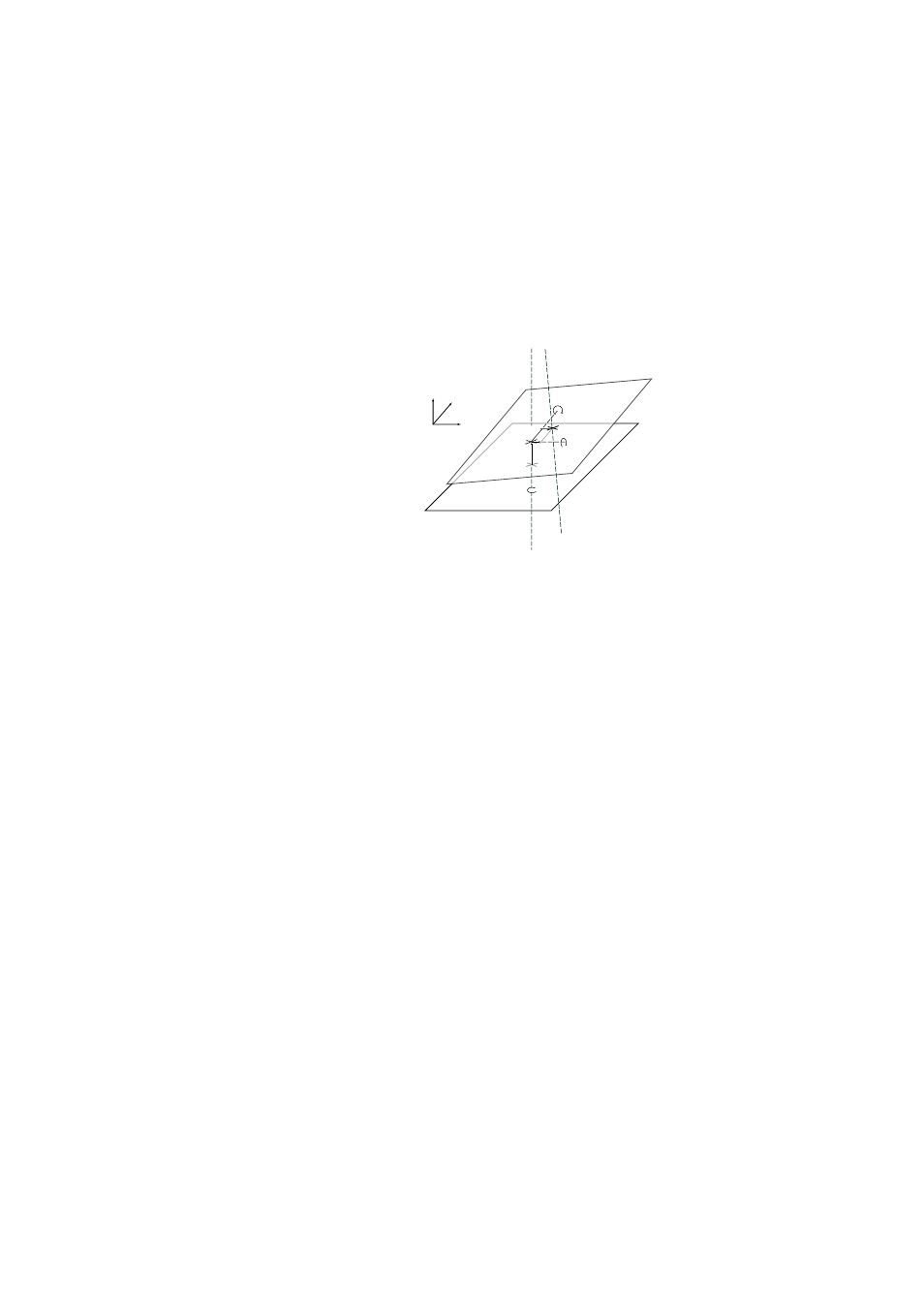
• Plane Similarity: In this method, the user should provide
three or more reference points among which at least two
of them should be held horizontally. A least-square
transformation is performed to determine the local grid.
The transformation includes rotation and translation of
the plane defined by the standard projection system used,
as well as scale factor change. The use of three reference
x
y
z
Local grid
Se
lec
ted pr
ojec
tion syst
em
dy
dx
rotx
roty
rotz
dz