5 speed/torque control change mode, Signals and wiring – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 83
3 - 36
3. SIGNALS AND WIRING
3.4.5 Speed/torque control change mode
Set "0003" in parameter No. 0 to switch to the speed/torque control change mode.
(1) Control change (LOP)
Use control change (LOP) to switch between the speed control mode and the torque control mode from
an external contact. Relationships between LOP and control modes are indicated below:
(Note) LOP
Servo control mode
0
Speed control mode
1
Torque control mode
Note. 0: off
1: on
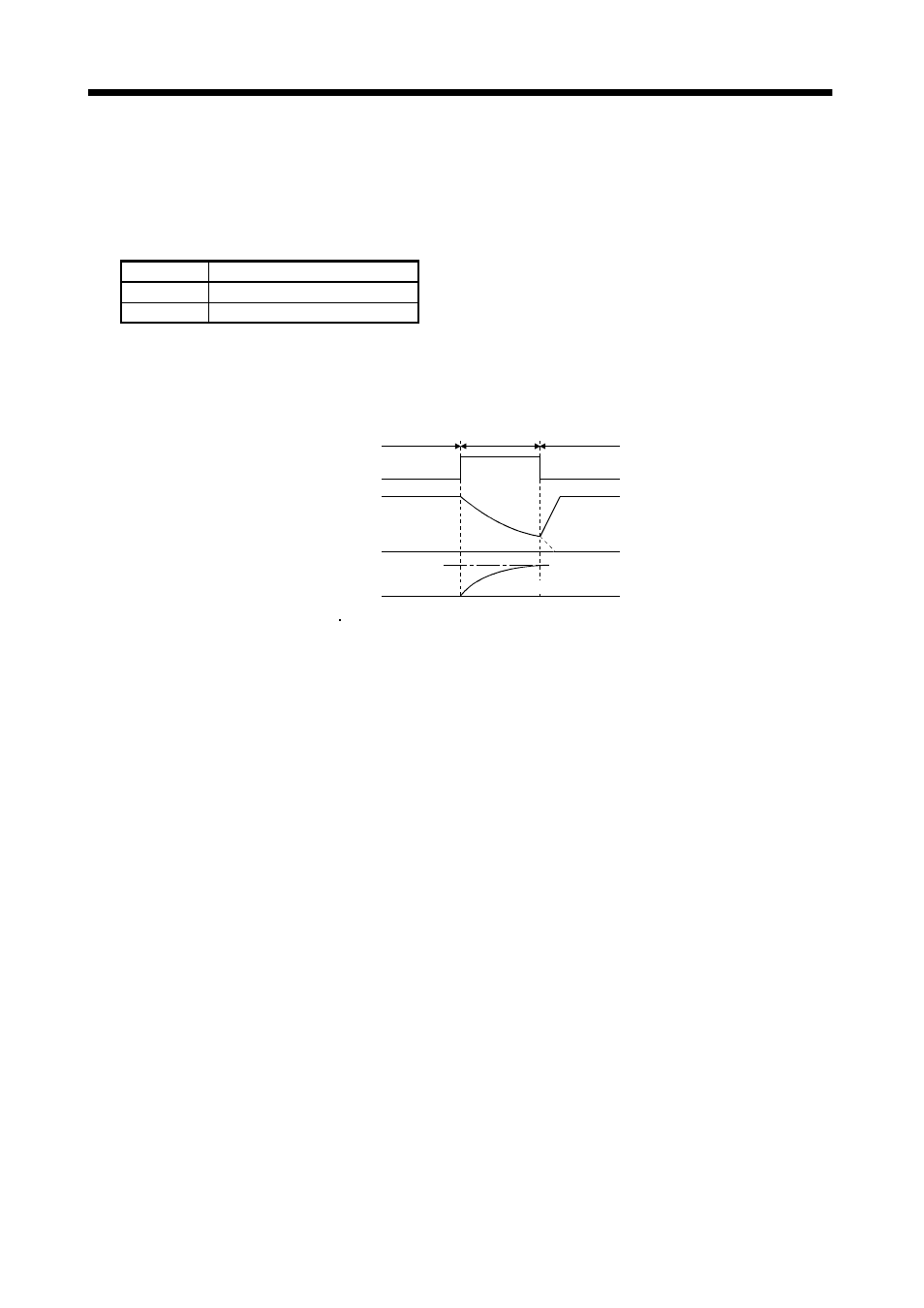
The control mode may be changed at any time. A change timing chart is shown below:
Note: When the start (ST1 ST2) is switched off as soon as the mode is changed to speed control,
the servo motor comes to a stop according to the deceleration time constant.
10V
0
ON
OFF
Torque
control mode
Servo motor speed
Control change (LOP)
(Note)
Speed
control mode
Speed
control mode
Analog torque
command (TC)
Load torque
Forward rotation in driving mode
(2) Speed setting in speed control mode
As in Section 3.4.2 (1).
(3) Torque limit in speed control mode
As in Section 3.4.1 (5).