Absolute position detection system – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 365
15 - 58
15. ABSOLUTE POSITION DETECTION SYSTEM
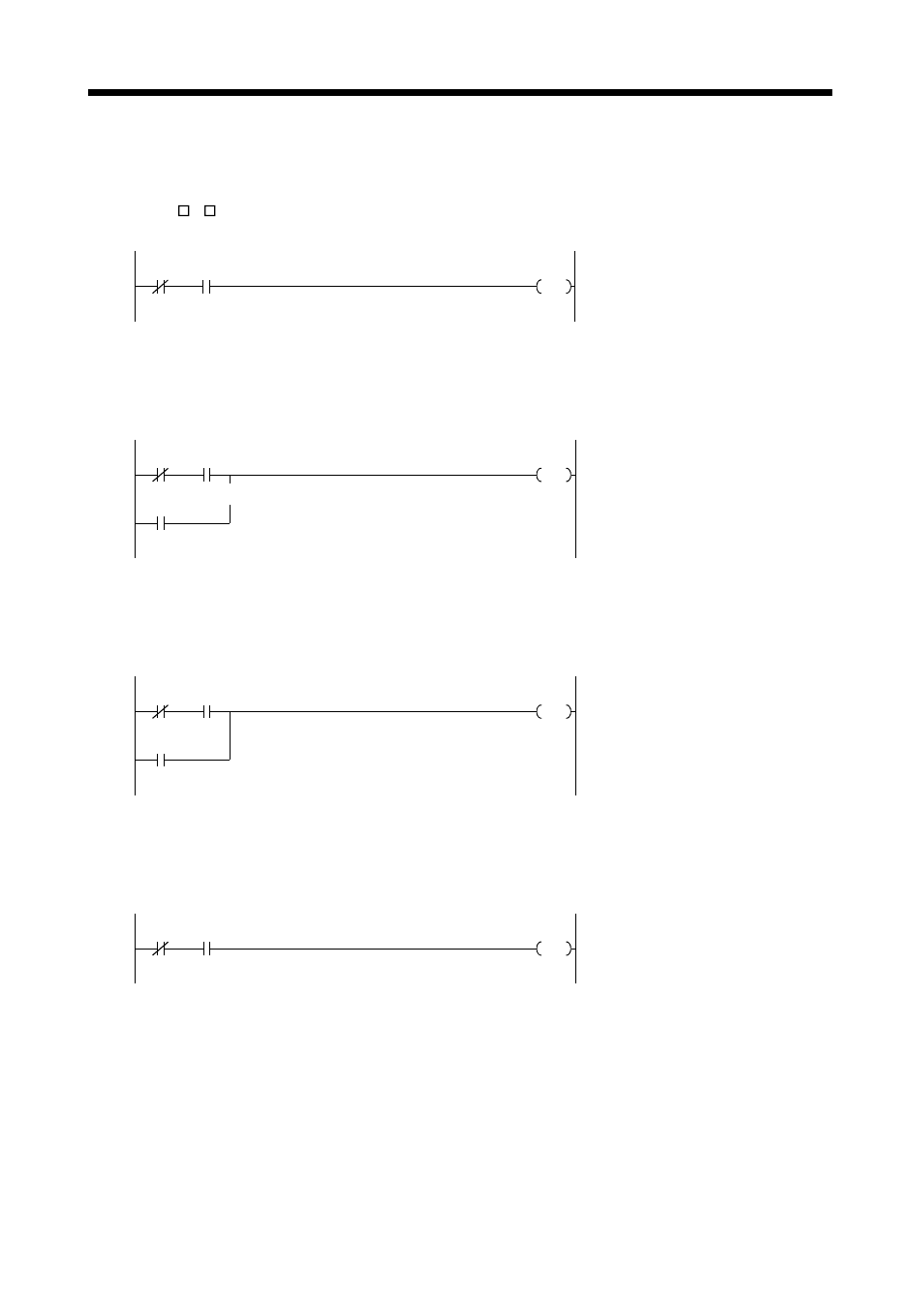
(g) Electromagnetic brake output
During ABS data transfer (for several seconds after the servo-on (SON) is turned on), the servo
motor must be at a stop.
Set "1 1 " in parameter No. 1 of the servo amplifier to choose the electromagnetic brake interlock
(MBR).
Y31
X21
Y34
Electromagnetic brake output
ABS transfer
mode
Brake (MBR)
(h) Positioning completion
To create the status information for servo positioning completion.
During ABS data transfer (for several seconds after the servo-on (SON) is turned on), the servo
motor must be at a stop.
Y31
X20
M
Y31
Servo positioning completion
ABS transfer
mode
Positioning
completion
ABS transfer
mode
(i) Zero speed
To create the status information for servo zero speed.
During ABS data transfer (for several seconds after the servo-on (SON) is turned on), the servo
motor must be at a stop.
Y31
X21
M
Y31
Servo zero speed
ABS transfer
mode
Zero
speed
ABS transfer
mode
(j) Torque limiting
To create the status information for the servo torque limiting mode.
During ABS data transfer (for several seconds after the servo-on (SON) is turned on), the torque
limiting must be off.
Y31
X22
M
Servo torque limiting mode
ABS transfer
mode
Torque limiting
mode