2 speed control mode, Signals and wiring – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 76
3 - 29
3. SIGNALS AND WIRING
3.4.2 Speed control mode
(1) Speed setting
(a) Speed command and speed
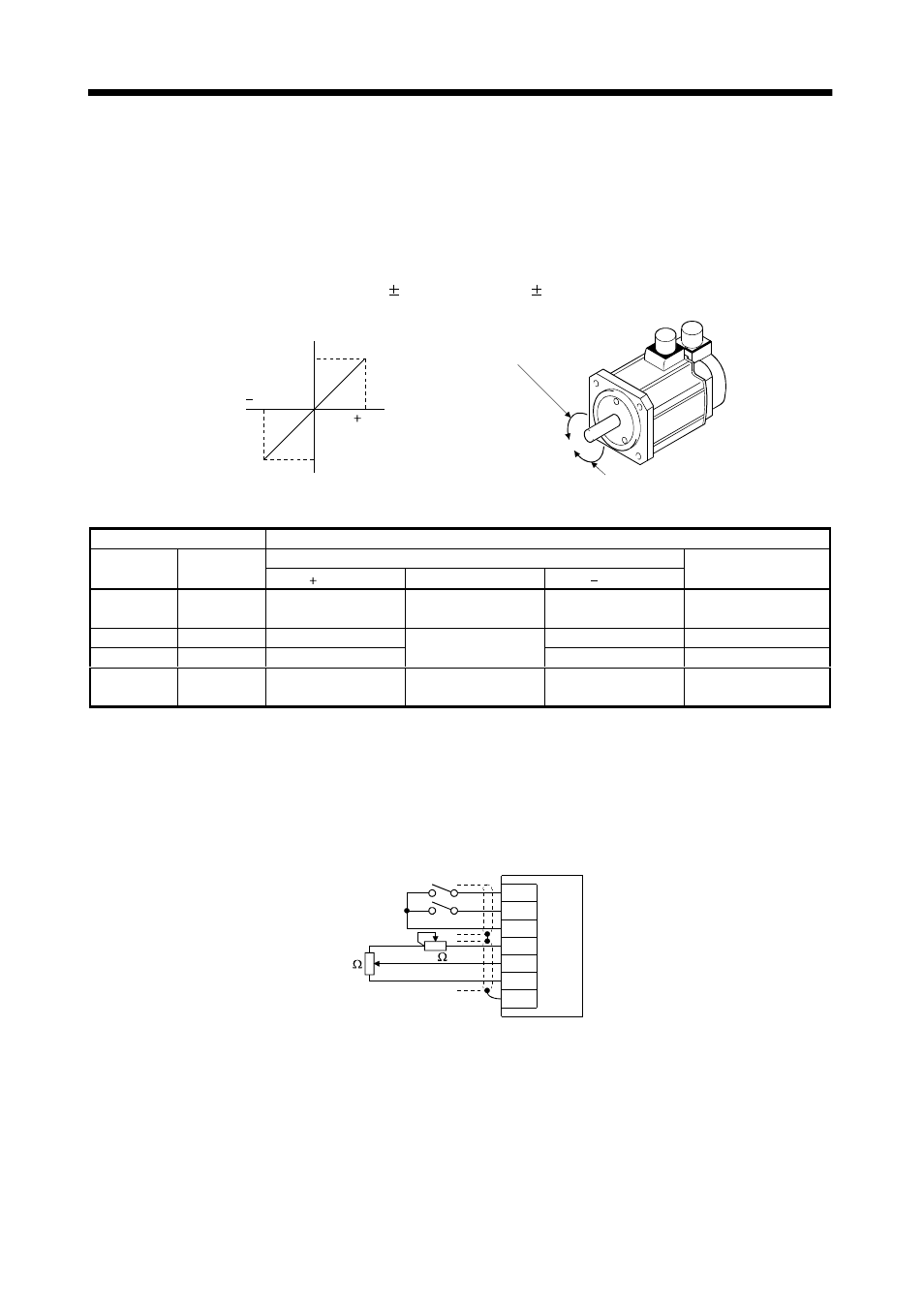
The servo motor is run at the speeds set in the parameters or at the speed set in the applied
voltage of the analog speed command (VC). A relationship between the analog speed command
(VC) applied voltage and the servo motor speed is shown below:
The maximum speed is achieved at 10V. The speed at 10V can be changed using parameter No.
25.
10
0
10
Rated speed [r/min]
Speed [r/min]
CW direction
VC applied voltage [V]
CCW direction
Rated speed
Forward rotation (CCW)
Reverse rotation (CW)
The following table indicates the rotation direction according to forward rotation start (ST1) and
reverse rotation start (ST2) combination:
(Note 1) External input signals
(Note 2) Rotation direction
Analog speed command (VC)
ST2
ST1
Polarity
0V
Polarity
Internal speed
commands
0
0
Stop
(Servo lock)
Stop
(Servo lock)
Stop
(Servo lock)
Stop
(Servo lock)
0
1
CCW
CW
CCW
1
0
CW
Stop
(No servo lock)
CCW
CW
1
1
Stop
(Servo lock)
Stop
(Servo lock)
Stop
(Servo lock)
Stop
(Servo lock)
Note 1. 0: off
1: on
2. If the torque limit is canceled during servo lock, the servomotor may suddenly rotate according to position deviation in
respect to the command position.
The forward rotation start (ST1) and reverse rotation start (ST2) can be assigned to any pins of
the connector CN1A, CN1B using parameters No. 43 to 48.
Generally, make connection as shown below:
ST1
ST2
SG
P15R
VC
LG
SD
2k
2k
Servo amplifier
Japan resistor
RRS10 or equivalent