Absolute position detection system – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 332
15 - 25
15. ABSOLUTE POSITION DETECTION SYSTEM
(3) Sequence program example
(a) Conditions
This sample program is an ABS sequence program example for a single axis (X axis).
To transmit the ABS data using the OFF-to-ON change of the servo-on (SON) as the trigger.
1) When the servo-on (SON) and the GND of the power supply are shorted, the ABS data is
transmitted when the power to the servo amplifier power is turned ON, or at the leading edge of
the RUN signal after a PC reset operation (PC-RESET). The ABS data is also transmitted when
an alarm is reset, or when the emergency stop state is reset.
2) If a check sum discrepancy is detected in the transmitted data, ABS data transmission is retried
up to three times. If the check sum discrepancy is still detected after retrying, the ABS check
sum error is generated (Y4A ON).
3) The following time periods are measured and if the ON/OFF state does not change within the
specified time, the ABS communication error is generated (Y4A ON).
ON period of ABS transfer mode (Y41)
ON period of ABS request (Y42)
OFF period of ready to send ABS data (X32).
4) If the relationship between the polarity ( ) of the received ABS data and the setting value for
parameter No. 14 (rotating direction) of A1SD71 involves negative coordinate values, which
cannot be handled by the A1SD71, the ABS coordinate error is generated (Y4B ON).
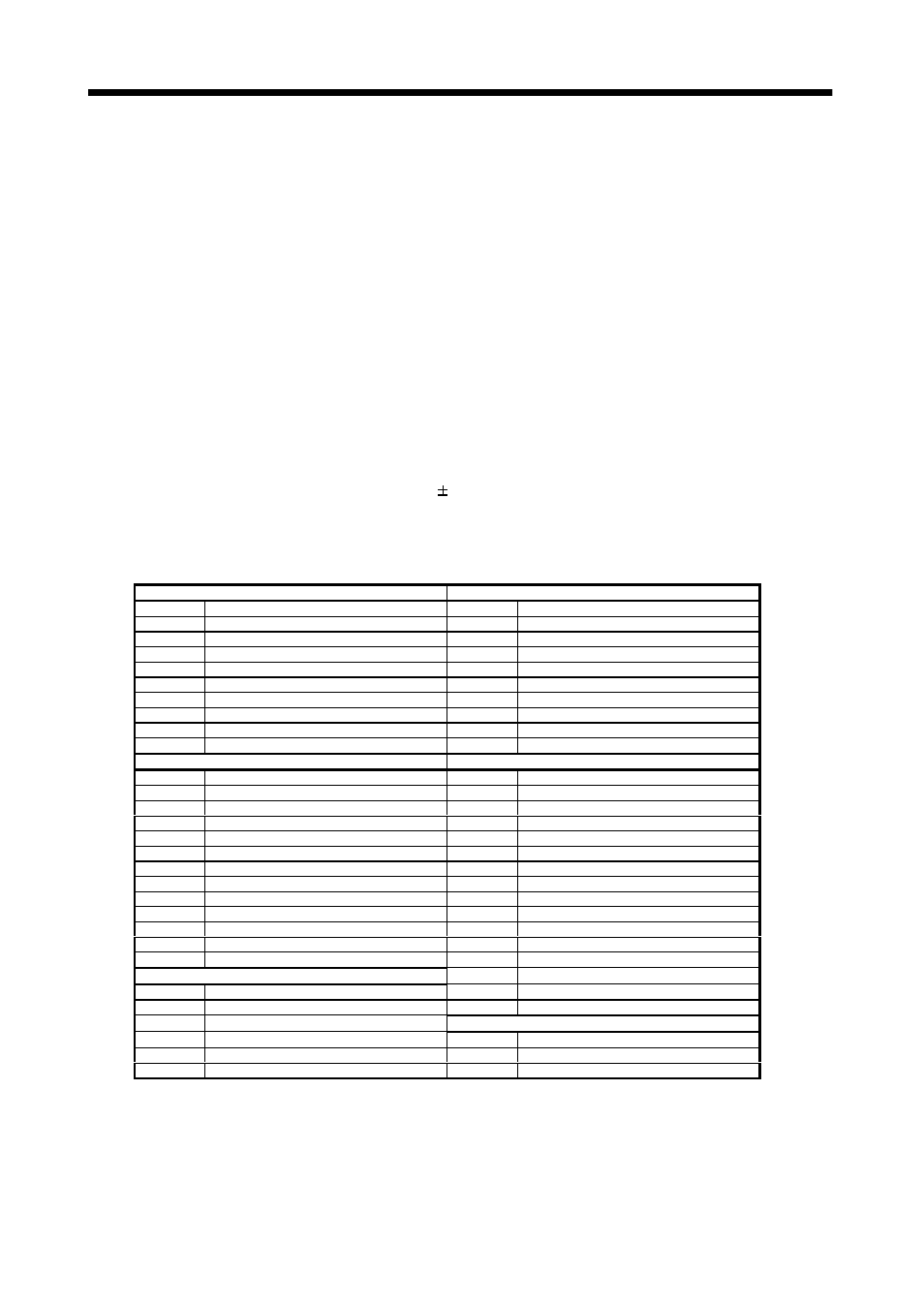
(b) Device list
X input contact
Y output contact
X30
ABS bit 0 / completion of positioning
Y40
Servo-on
X31
ABS bit 1 / zero speed
Y41
ABS transfer mode
X32
Send ABS data ready / torque limit control Y42
ABS request
X33
Servo alarm
Y43
Alarm reset
X34
Error reset
X44
(Note 2)
Electromagnetic brake output
X35
Servo emergency stop
Y45
(Note 1)
Clear
X36
Servo-on
Y48
Servo alarm
X37
Home position return start
Y49
ABS communication error
X38
Operation mode I
Y4A
ABS check sum error
X39
Operation mode II
Y4B
ABS coordinate error
D register
M contact
D0
ABS data transmission counter
M0
ABS data transmission start
D1
Check sum transmission counter
M1
Sum check completion
D2
Check sum addition counter
M2
Sum check discrepancy
D3
ABS data: Lower 16 bits
M3
ABS data ready
D4
ABS data: Upper 16 bits
M4
Transmission data read enabled
D5
ABS data 2-bit receiving buffer
M5
Check sum 2 bits read completion
D6
Check data in case of check sum error
M6
ABS 2 bits read completion
D7
Retry frequency
M7
ABS 2 bits request
D8
Forward rotation direction
M8
Servo-on request
D9
Home position address: Lower 16 bits
M9
Servo alarm
D10
Home position address: Upper 16 bits
M10
ABS data transmission retry start pulse
D100
Received shift data: Lower 16 bits
M11
Retry flag setting
D101
Received shift data: Upper 16 bits
M12
Retry flag reset
T timer
M13
PLS processing command
T0
ABS transfer mode timer
M20
(Note 1)
Clear (CR) ON timer request
T1
ABS request response timer
M21
(Note 2)
Data set type home position return request
T2
Retry wait timer
C counter
T3
Ready to send response timer
C0
ABS data receive frequency counter
T10
(Note 1)
Clear (CR) ON timer
C1
Check sum receive frequency counter
T200
Transmitted data read 10ms delay timer
C2
Retry counter
Note 1. Necessary when data set type home position return is executed.
2. Necessary in the event of electromagnetic brake output.