Absolute position detection system – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 364
15 - 57
15. ABSOLUTE POSITION DETECTION SYSTEM
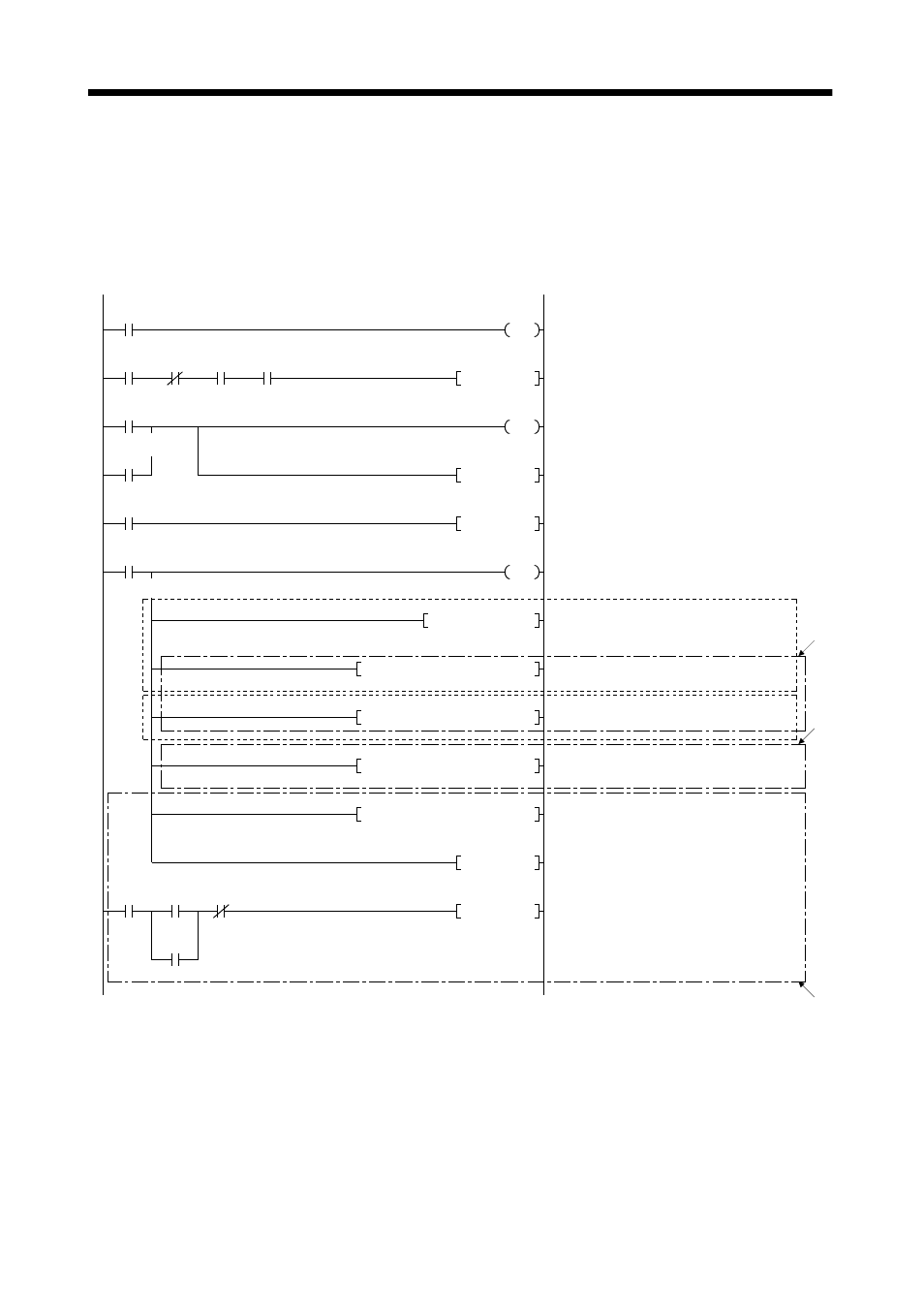
(f) Data set type home position return
After jogging the machine to the position where the home position (e.g. 500) is to be set, choose the
home position return mode and set the home position with the home position return start (PBON).
After switching power on, rotate the servo motor more than 1 revolution before starting home
position return.
Do not turn ON the clear (CR) (Y35) for an operation other than home position return. Turning it
on in other circumstances will cause position shift.
M9039
Y1D
Y31
X20
X27
M20
M21
T10
M20
PLS
M21
D9
K500
DMOVP
K1
D9
K72
H0000
DTOP
K1
D9
K72
H0000
DFROP
K1
D9
K1154
H0000
DTOP
T10
M21
SET
K1
M21
RST
Y35
(Note 1)
(Note 2)
19)
18)
K1
K9003
K1150
H0000
TO
Y10
SET
X1
X4
Y10
Y10
RST
XA
17)
Programmable controller ready
Clear (CR) ON timer request
Clear (CR) 100ms ON timer
Setting data set type home position return request
Resetting data set type home position return
request
Switch clear (CR) on
Setting X-axis home position address 500
in data register
*1: Changing X-axis home position address
(Note3)
*1: Changing X-axis current value
*1: Writing positioning data No. 9003
Starting positioning
Switching BUSY signal off to switch start
signal off.
PC RUN
Home position
return mode
ABS transfer
mode
Positioning
completion
Home position
return start PB
Clear signal ON
timer request
Data set type home position return request
Clear signal 100ms ON timer
Data set type home position
return request
Positioning
start
Start
completion
BUSY
Error detection
Note 1. If the data of the home position address parameter is not written from the A7PHP programming tool or the like
before starting the data set type home position return program, this sequence circuit (Note 1) is required and
the sequence circuit (Note 2) is not required.
2. Contrary to above 2, if the home position address is written in the home position address parameter,
the sequence circuit (Note1) is not required but this sequence circuit (Note 1) is required.
3. Changes are stored temporarily to buffer memory at this time. An additional processing is required
when changes should be reflected to memory for OS or flash ROM. For details, refer to the positioningmodule user's manual.