Absolute position detection system – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 339
15 - 32
15. ABSOLUTE POSITION DETECTION SYSTEM
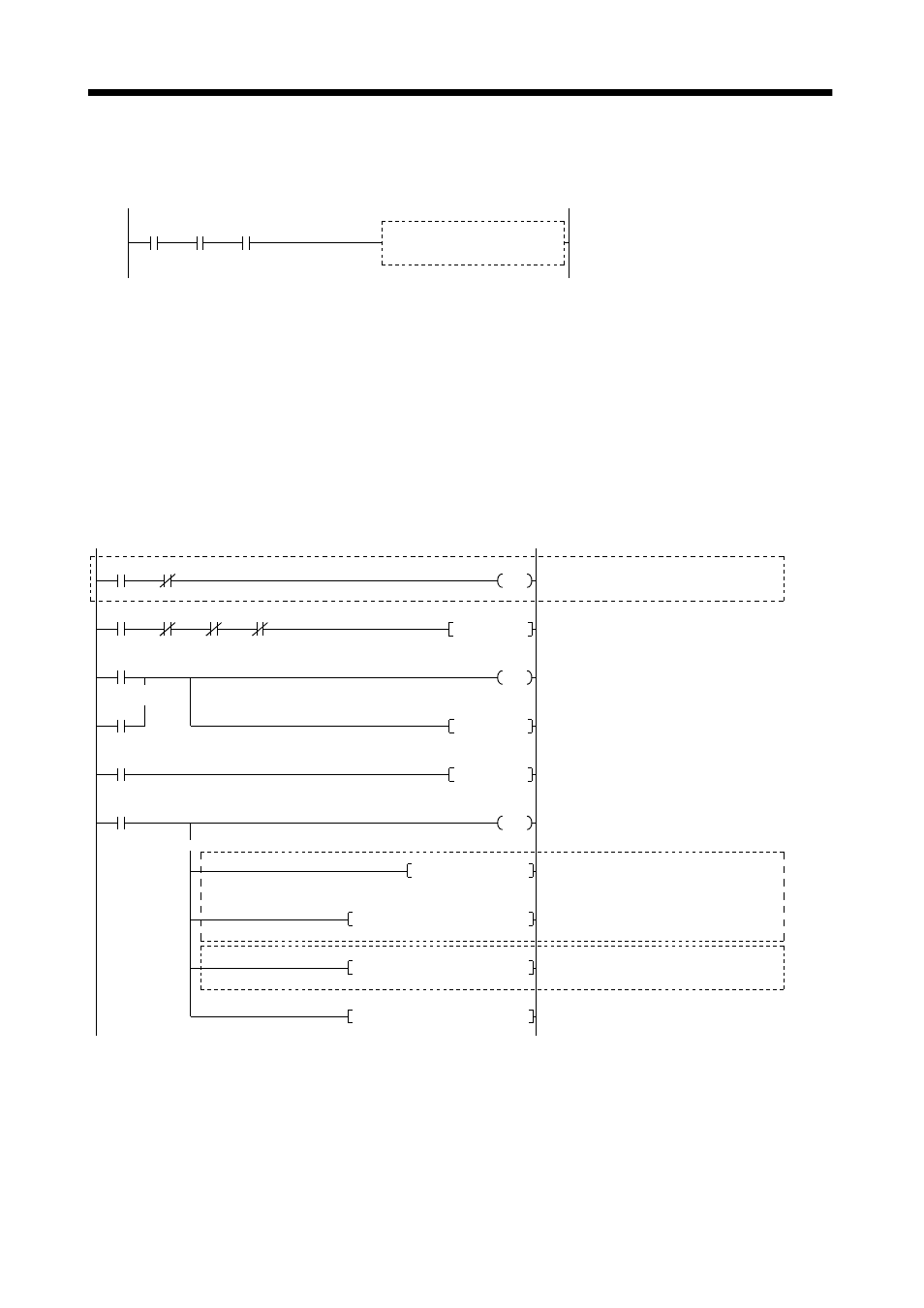
(d) X-axis control program
This precludes execution of the X-axis start program while M3 (ready to send the ABS data) is
OFF.
When M3 (ready to send the ABS data)
is turned ON, the X-axis start command
executes the X-axis start program.
X-axis start program
Positioning
mode
X-axis start
command M3
Ready to
send the
ABS date
(e) Dog type home position return
For an example of a program for the dog type home position return operation, refer to the home
position return program presented in the User's Manual for A1SD71.
(f) Data set type home position return
After jogging the machine to the position where the home position (e.g.500) is to be set, choose the
home position return mode set the home position with the home position return start (PB ON).
After switching power on, rotate the servo motor more than 1 revolution before starting home
position return.
Do not turn ON the clear (CR) (Y45) for an operation other than home position return. Turning it
ON in other circumstances will cause position shift.
M9039
T10
M20
PLS
M21
SET
Y2D
PC ready
Clear (CR) ON timer request
Clear (CR) 100ms ON timer
Setting data set type home position return request
Resetting data set type home position return request
Clear (CR) ON
Setting X-axis home position address "500"
in the data register
*1:Changing X-axis home position address
PC RUN
Clear signal 100ms ON timer
Home position return mode
Home position
Y41
return mode
X30
X37
ABS
transfer
mode
Positioning
completion
Home position
return start PB
(Note 1)
M20
M21
Clear (CR) ON
timer request
T10
K1
M21
RST
Data set type home
position return request
M21
Data set type home
Y45
position return request
D9
K500
DMOVP
K1
D9
H0001
DTOP
K7912
K1
D9
H0001
DFROP
K7912
K1
D9
H0001
DTOP
K41
*1:Changing X-axis present position data
(Note 1)
(Note 2)
Note 1. If data of the home position address parameter is not written by using an A6GPP programming tol, etc. before
starting a program for data set type home position return, the circuits indicated by Note 1 are necessary and the
circuit indicated by Note 2 is not necessary.
2. Contrary to Note 1 above, if the home position address is written in the home position address parameter.
the circuit indicated by Note 3 is necessary and the circuits indicated by Note 1 are not necessary.