Parameters – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 127
5 - 8
5. PARAMETERS
Class
No.
Symbol
Name and function
Initial
value
Unit
Setting
range
Control
mode
5
INP
In-position range
Used to set the in-position (INP) output range in the command pulse
increments prior to electronic gear calculation.
For example, when you want to set 100 m when the ballscrew is
directly coupled, the lead is 10mm, the feedback pulse count is 131072
pulses/rev, and the electronic gear numerator (CMX)/electronic gear
denominator (CDV) is 16384/125 (setting in units of 10 m per pulse),
set "10" as indicated by the following expression.
100 10
6
10 10
3
131072[pulse/rev]
16384
125
10
100
pulse
0
to
10000
P
6
PG1
Position loop gain 1
Used to set the gain of position loop.
Increase the gain to improve trackability in response to the position
command.
When auto turning mode 1,2 is selected, the result of auto turning is
automatically used.
7kW or
less: 35
11kW or
more: 19
red/s
4
to
2000
P
Position command acceleration/deceleration time constant
(position smoothing)
Used to set the time constant of a low pass filter in response to the
position command.
You can use parameter No. 55 to choose the primary delay or linear
acceleration/deceleration control system. When you choose linear
acceleration/deceleration, the setting range is 0 to 10ms. Setting of
longer than 10ms is recognized as 10ms.
POINT
7
PST
When you have chosen linear acceleration/deceleration, do not
select control selection (parameter No. 0) and restart after
instantaneous power failure (parameter No. 20). Doing so will
cause the servo motor to make a sudden stop at the time of
position control switching or restart.
3
ms
0
to
20000
P
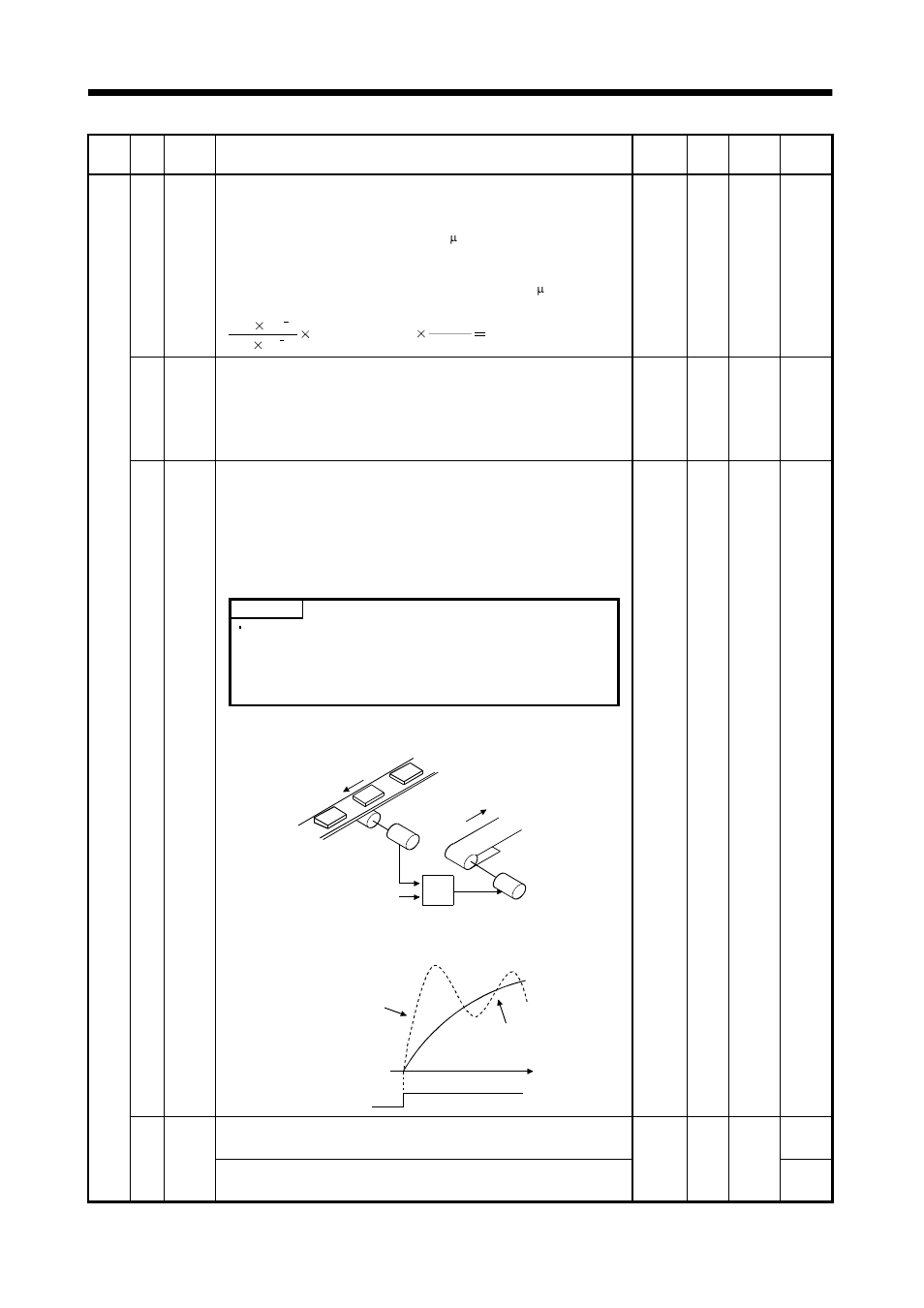
Example: When a command is given from a synchronizing detector,
synchronous operation can be started smoothly if started during line
operation.
Synchronizing
detector
Start
Servo amplifier
Servo motor
Without time
constant setting
Servo motor
speed
Start
With time
constant setting
ON
OFF
t
Internal speed command 1
Used to set speed 1 of internal speed commands.
S
B
asi
c p
ara
m
et
ers
8
SC1
Internal speed limit 1
Used to set speed 1 of internal speed limits.
100
r/min
0 to
instan-
taneous
permi-
ssible
speed
T