2 auto tuning, 1 auto tuning mode, General gain adjustment – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 172
7 - 3
7. GENERAL GAIN ADJUSTMENT
7.2 Auto tuning
7.2.1 Auto tuning mode
The servo amplifier has a real-time auto tuning function which estimates the machine characteristic (load
inertia moment ratio) in real time and automatically sets the optimum gains according to that value. This
function permits ease of gain adjustment of the servo amplifier.
(1) Auto tuning mode 1
The servo amplifier is factory-set to the auto tuning mode 1.
In this mode, the load inertia moment ratio of a machine is always estimated to set the optimum gains
automatically.
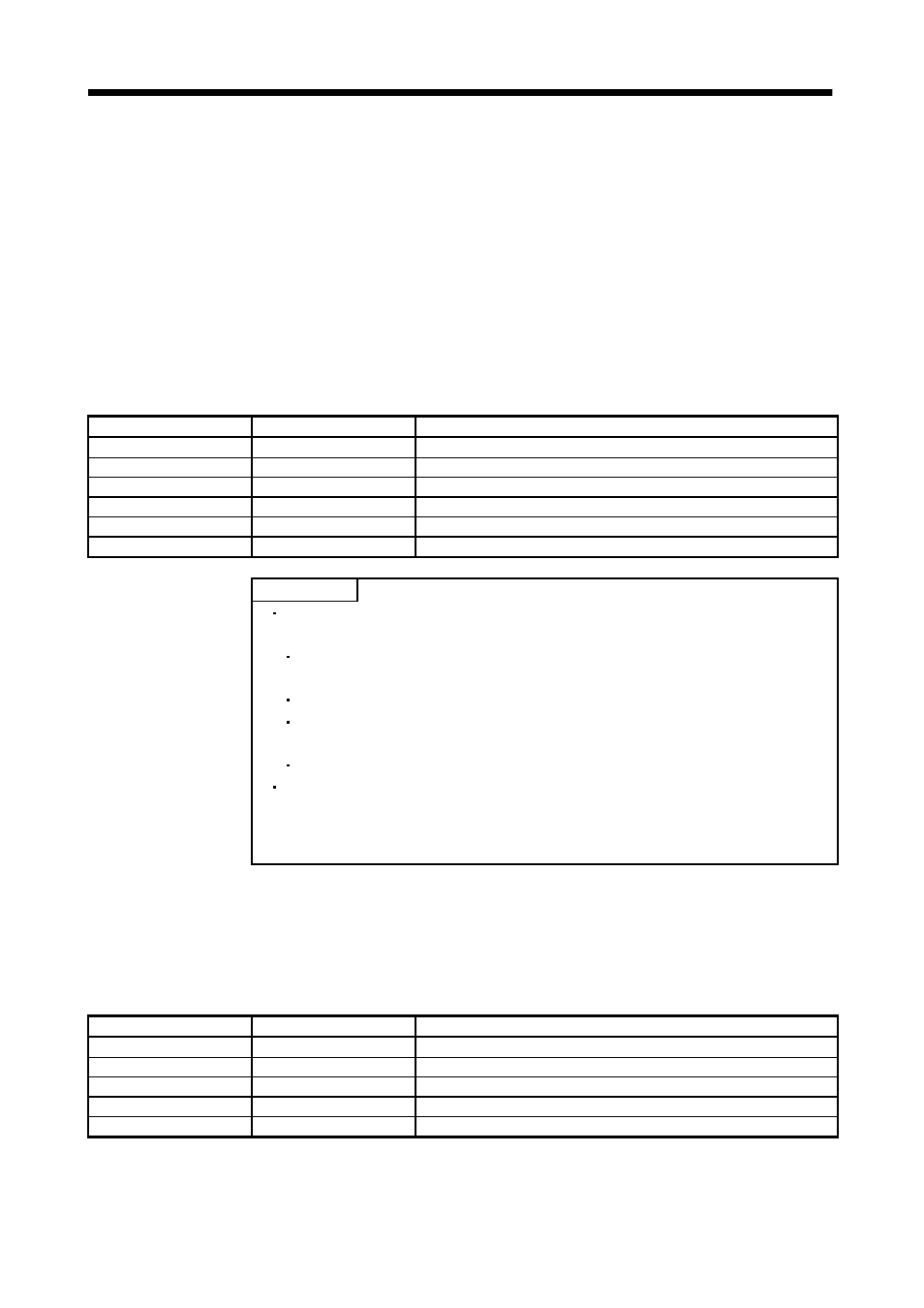
The following parameters are automatically adjusted in the auto tuning mode 1.
Parameter No.
Abbreviation
Name
6
PG1
Position control gain 1
34
GD2
Ratio of load inertia moment to servo motor inertia moment
35
PG2
Position control gain 2
36
VG1
Speed control gain 1
37
VG2
Speed control gain 2
38
VIC
Speed integral compensation
POINT
The auto tuning mode 1 may not be performed properly if the following
conditions are not satisfied.
Time to reach 2000r/min is the acceleration/deceleration time constant of 5s or
less.
Speed is 150r/min or higher.
The ratio of load inertia moment to servo motor inertia moment is 100
times or less.
The acceleration/deceleration torque is 10% or more of the rated torque.
Under operating conditions which will impose sudden disturbance torque
during acceleration/deceleration or on a machine which is extremely loose,
auto tuning may not function properly, either. In such cases, use the auto
tuning mode 2 or manual mode 1,2 to make gain adjustment.
(2) Auto tuning mode 2
Use the auto tuning mode 2 when proper gain adjustment cannot be made by auto tuning mode 1.
Since the load inertia moment ratio is not estimated in this mode, set the value of a correct load
inertia moment ratio (parameter No. 34).
The following parameters are automatically adjusted in the auto tuning mode 2.
Parameter No.
Abbreviation
Name
6
PG1
Position control gain 1
35
PG2
Position control gain 2
36
VG1
Speed control gain 1
37
VG2
Speed control gain 2
38
VIC
Speed integral compensation