Signals and wiring – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 63
3 - 16
3. SIGNALS AND WIRING
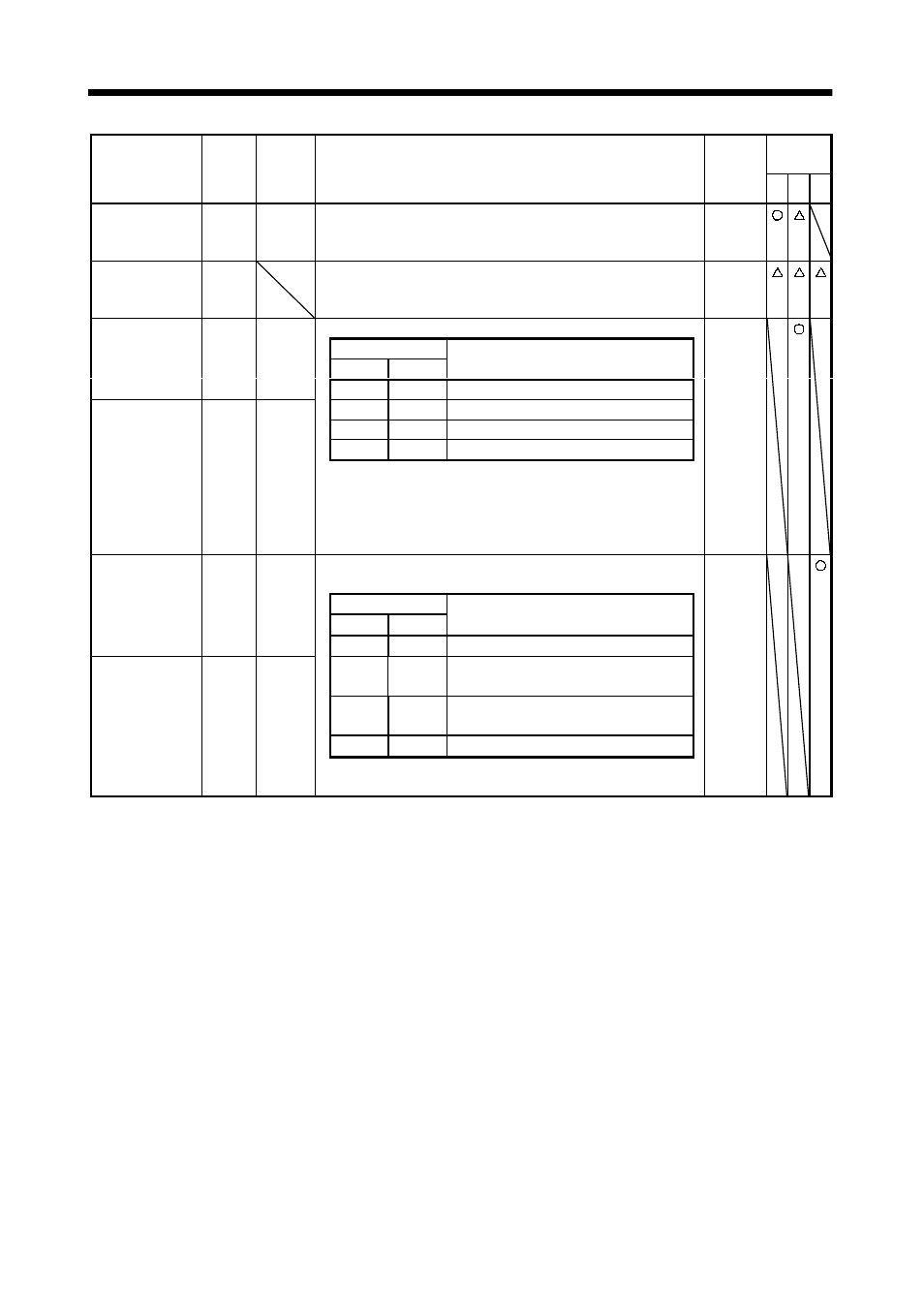
Control
mode
Signal
Symbol
Connec-
tor pin
No.
Functions/Applications
I/O
division
P
S
T
External torque
limit selection
TL
CN1B
9
Turn TL off to make Internal torque limit 1 (parameter No. 28)
valid, or turn it on to make Analog torque limit (TLA) valid.
For details, refer to (5), Section 3.4.1.
DI-1
Internal
torque limit
selection
TL1
When using this signal, make it usable by making the setting of
parameter No. 43 to 48.
For details, refer to (5), Section 3.4.1.
DI-1
Used to start the servo motor in any of the following directions:
(Note) Input signals
ST2
ST1
Servo motor starting direction
Forward rotation
start
ST1
CN1B
8
0
0
Stop (servo lock)
0
1
CCW
1
0
CW
1
1
Stop (servo lock)
Reverse rotation
start
ST2
CN1B
9
Note. 0: off
1: on
If both ST1 and ST2 are switched on or off during operation, the
servo motor will be decelerated to a stop according to the
parameter No. 12 setting and servo-locked.
DI-1
Used to select any of the following servo motor torque generation
directions:
(Note) Input signals
RS2
RS1
Torque generation direction
Forward rotation
selection
RS1
CN1B
9
0
0
Torque is not generated.
0
1
Forward rotation in driving mode /
reverse rotation in regenerative mode
1
0
Reverse rotation in driving mode /
forward rotation in regenerative mode
1
1
Torque is not generated.
Reverse rotation
selection
RS2
CN1B
8
Note. 0: off
1: on
DI-1