Absolute position detection system, 2) connection diagram – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 331
15 - 24
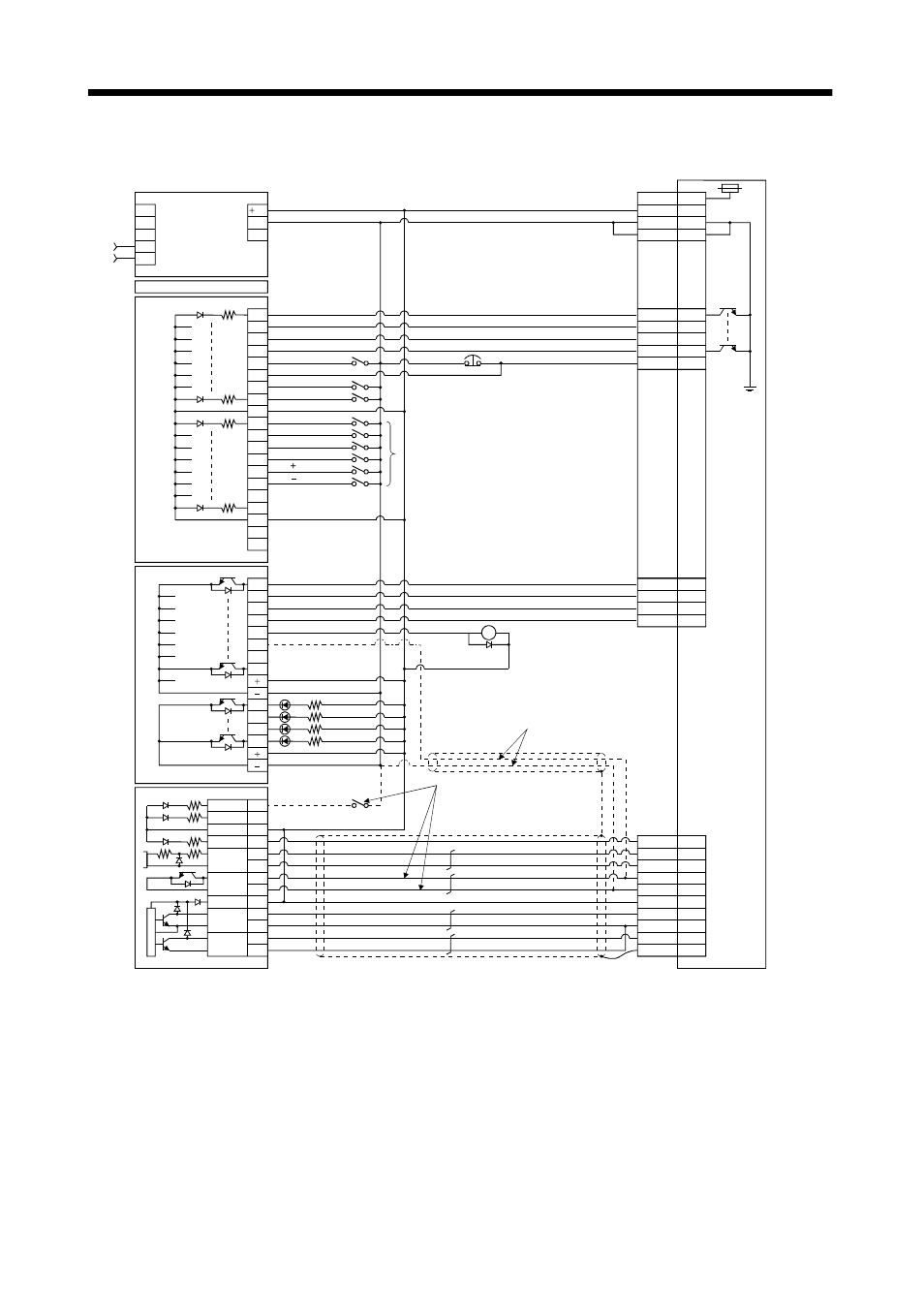
15. ABSOLUTE POSITION DETECTION SYSTEM
(2) Connection diagram
PULSE-
R
PULSE-
F
PGO
DOG
RDY
16B
16A
15B
15A
9B
9A
5B
6B
0
1
2
3
4
5
7
COM
8
9
A
B
C
D
E
F
COM
NC
NC
6
0
1
2
3
4
5
7
6
8
9
A
B
A1SD71-S2
A1SY40
A1SX40
A1SCPU
A1S62P
INPUT
AC100/200
COM1
COM2
(Note 3)
(Note 2)
12A
CLEAR
SD
NP
PP
SG
RD
P15R
CR
SG
19
4
8
10
20
3
2
Plate
5
8
9
14
RES
ABSR
SON
ABSM
4
19
6
18
ZSP
15
EMG
3
13
10
20
SG
SG
VDD
COM
CN1B
24
24G
FG
LG
Servo amplifier
CN1A
STOP
6A
5A
12B
17A
TLC
ALM
DO1
OP
14
OPC
11
General purpose
programmable controller
Power
supply
ABS bit 0/Completion of positioning
ABS bit 1/Zero speed
Send data ready/Torque limit control
Trouble
Servo-on
ABS transfer mode
ABS request
Alarm reset
Power supply
Power supply
Electromagnetic
brake output
(Note 4)
(Note 1)
JOG
JOG
Alarm reset
Emergency stop
Servo-on
Home position return
Operation mode I
Operation mode II
Position start
Position stop
Note 1. To be connected for dog type home position setting. The connection in Note 2 is not required.
2. To be connected for data set type home position setting. The connection in Note 1 is not required.
3. This circuit is for reference only.
4. The electromagnetic brake interlock (MBR) output should be controlled by connecting the programmable controller output to a relay.
RA2