5 model code definition, Functions and configuration, Mitsubishi – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 26
1 - 7
1. FUNCTIONS AND CONFIGURATION
Function
Description
(Note)
Control mode
Reference
Return converter
Used when the regenerative brake option cannot provide
enough regenerative power.
Can be used with the MR-J2S-500A to MR-J2S-22KA.
P, S, T
Section 13.1.3
Alarm history clear
Alarm history is cleared.
P, S, T
Parameter No. 16
Restart after instantaneous
power failure
If the input power supply voltage had reduced to cause an
alarm but has returned to normal, the servo motor can be
restarted by merely switching on the start signal.
S
Parameter No. 20
Command pulse selection
Command pulse train form can be selected from among four
different types.
P
Parameter No. 21
Input signal selection
Forward rotation start, reverse rotation start, servo-on
(SON) and other input signals can be assigned to any pins.
P, S, T
Parameters
No. 43 to 48
Torque limit
Servo motor torque can be limited to any value.
P, S
Section 3.4.1 (5)
Parameter No. 28
Speed limit
Servo motor speed can be limited to any value.
T
Section 3.4.3 (3)
Parameter No. 8
to 10,72 to 75
Status display
Servo status is shown on the 5-digit, 7-segment LED
display
P, S, T
Section 6.2
External I/O signal display
ON/OFF statuses of external I/O signals are shown on the
display.
P, S, T
Section 6.6
Output signal (DO)
forced output
Output signal can be forced on/off independently of the
servo status.
Use this function for output signal wiring check, etc.
P, S, T
Section 6.7
Automatic VC offset
Voltage is automatically offset to stop the servo motor if it
does not come to a stop at the analog speed command (VC)
or analog speed limit (VLA) of 0V.
S, T
Section 6.3
Test operation mode
JOG operation positioning operation motor-less operation
DO forced output.
P, S, T
Section 6.8
Analog monitor output
Servo status is output in terms of voltage in real time.
P, S, T
Parameter No. 17
MR Configurator
(Servo configuration software)
Using a personal computer, parameter setting, test
operation, status display, etc. can be performed.
P, S, T
Section 13.1.9
Alarm code output
If an alarm has occurred, the corresponding alarm number
is output in 3-bit code.
P, S, T
Section 10.2.1
Note. P: Position control mode, S: Speed control mode, T: Torque control mode
P/S: Position/speed control change mode, S/T: Speed/torque control change mode, T/P: Torque/position control change mode
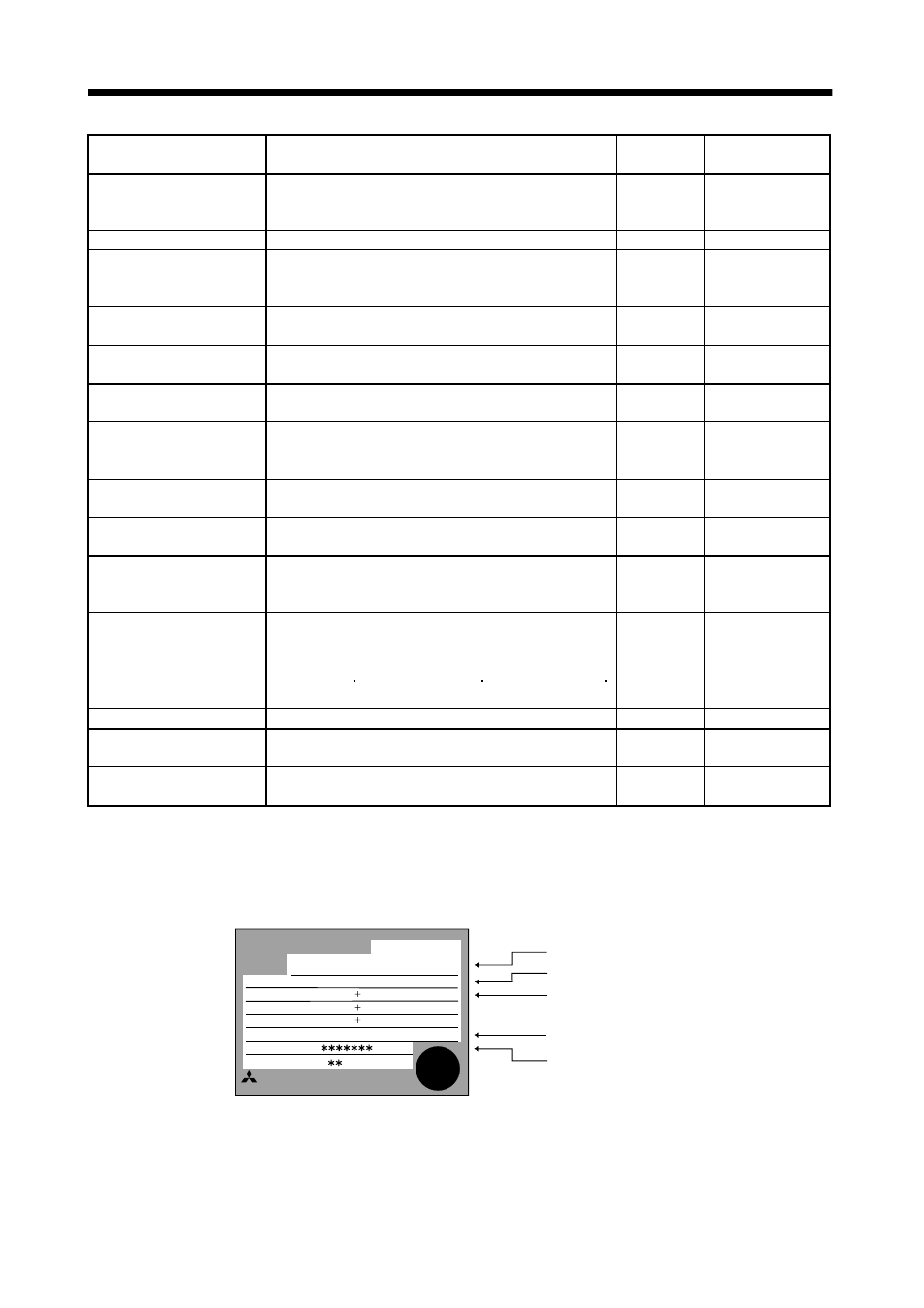
1.5 Model code definition
(1) Rating plate
POWER
MITSUBISHI
AC SERVO
MADE IN JAPAN
MODEL
MR-J2S-60A
MITSUBISHI ELECTRIC CORPORATION
600W
3.2A 3PH 1PH200-230V 50Hz
170V 0-360Hz 3.6A
POWER :
INPUT :
OUTPUT :
SERIAL :
AC SERVO
A5
PASSED
Model
Capacity
Applicable power supply
Rated output current
Serial number
3PH 1PH200-230V 60Hz
5.5A 1PH 230V 50/60Hz
TC3
AAAAG52