Signals and wiring – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 82
3 - 35
3. SIGNALS AND WIRING
(3) Speed setting in speed control mode
(a) Speed command and speed
The servo motor is run at the speed set in parameter No. 8 (internal speed command 1) or at the
speed set in the applied voltage of the analog speed command (VC). A relationship between analog
speed command (VC) applied voltage and servo motor speed and the rotation directions determined
by the forward rotation start (ST1) and reverse rotation start (ST2) are as in (a), (1) in section
3.4.2.
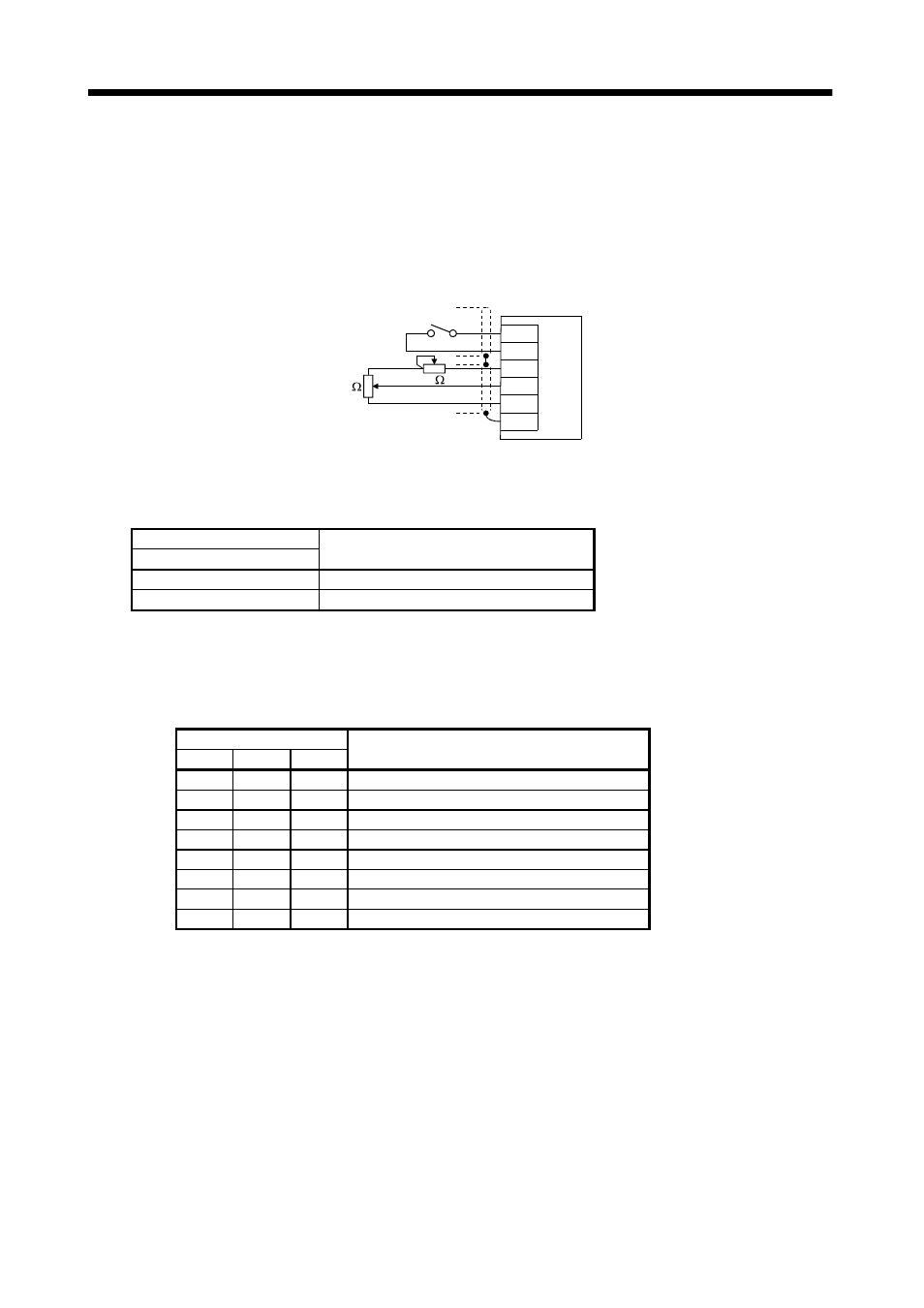
Generally, make connection as shown below:
Japan resistor
RRS10 or equivalent
SP1
SG
P15R
VC
LG
SD
Servo amplifier
2k
2k
(b) Speed selection 1 (SP1) and speed command value
Use speed selection 1 (SP1) to select between the speed set by the internal speed command 1 and
the speed set by the analog speed command (VC) as indicated in the following table:
(Note) External input signals
SP1
Speed command value
0
Analog speed command (VC)
1
Internal speed command 1 (parameter No. 8)
Note. 0: off
1: on
By making speed selection 2 (SP2) speed selection 3 (SP3) usable by setting of parameter No. 43
to 48, you can choose the speed command values of analog speed command (VC) and internal
speed commands 1 to 7.
(Note) External input signals
SP3
SP2
SP1
Speed command value
0
0
0
Analog speed command (VC)
0
0
1
Internal speed command 1 (parameter No. 8)
0
1
0
Internal speed command 2 (parameter No. 9)
0
1
1
Internal speed command 3 (parameter No. 10)
1
0
0
Internal speed command 4 (parameter No. 72)
1
0
1
Internal speed command 5 (parameter No. 73)
1
1
0
Internal speed command 6 (parameter No. 74)
1
1
1
Internal speed command 7 (parameter No. 75)
Note. 0: off
1: on
The speed may also be changed during rotation. In this case, it is increased or decreased according
to the value set in parameter No. 11 or 12.
When the internal speed command 1 is used to command the speed, the speed does not vary with
the ambient temperature.
(c) Speed reached (SA)
As in Section 3.4.2 (2).